谘詢電話
ENGLISH0755-88840386強製給料定量包裝機的研究(3)
發布時間:2020-08-27 16:37:03 |來源:網絡轉載
3強製給料定量包裝機包裝精度研究
前麵主要對強製定量給料包裝機的機械結構的整體分析、設計做了簡要的敘述,可以知道,在整個係統中,稱量係統是決定整體精度的主要因素。所以稱量係統的分析、設計在整體的設計中所占用的比例是很大。本章對稱量係統進行分析,並討論稱量係統的稱量精度問題。
3.1稱量係統簡介
稱重係統是定量包裝機的核心。隨著科學技術的發展,稱重技術也隨之不斷的向前發展,稱重模式的發展經曆了傳統的杠杆機械秤、機電結合式電子秤和傳感器式電子秤、電腦秤和微機控製秤等階段。
杠杆機械秤是指包含顯示功能在內的所有功能都能通過機械手段實現的秤。它主要由秤鬥和杠杆係統組成,其稱重速度慢、效率低、受人為因素影響比較大,不能適應生產自動化的要求。
電子秤釆用現代傳感器技術、電子技術和計算機技術一體化的電子裝置,能滿足並解決現實生活中提出的“快速、準確、連續、自動"稱量要求,同時有效的消除人為誤差,使之更符合法製計量管理和生產過程控製的應用要求。電子秤具有一個能將反力部分產生的變化轉換成電量的傳感器,還具有一個能處理電信號以獲得測量值的信號處理裝置。它主要由稱重、傳力複位係統(如機械計量鬥)、稱重傳感器以及稱重儀表等組成。稱重、傳力複位係統是被稱物體與轉換原件之間的機械、傳力複位係統,又稱電子秤的秤體。稱重傳感器是將非電量(質量)轉換成電量的轉換原件。它是把支承力轉換成電信號或者其它形式的適合計量求值信號所用的一種輔助手段。在傳感器式電子秤中,最常用的傳感器仍然是電阻應變式稱重傳感器,稱重儀表包括處理稱重傳感器信號的電子線路(包括放大器、模數轉換、電源、調節器、補償元件、保護線路)和知識部件(如顯示、打印。數據傳輸和存儲器件等),習慣上稱載荷測量裝置或者二次儀表。
現在稱量的方式有很多,而稱量係統設計的好壞將直接影響整個包裝機的性能。根據計量原理的不同大致可以分為容積式、稱重式、計數式三種計量方式。
(1)容積式計量方式容積式計量是按照計量物料的容積的比例大小進行計量。目前多釆用螺旋式、固定量杯式和可變量杯式。量杯通常采用葉輪和圓盤等容積計量方法。它是集給料機與配料設備為一體的設備。缺點是由於料倉內物料密度的變化,物料流動不穩定,導致容積式供料穩定性差,計量精度不高。優點是設備簡單,操作方便。適用於各種粉料混配的場合,在對配料或者稱量精度要求高的場合不適用。
(2)稱重式計量方式對於流動性差、比重變化較大或容易結塊的物料的計量往往用稱重式計量方式。主要通過稱重傳感器,利用數字式技術,能夠精確控製產品質量,提高包裝精度。同時由於該計量方式稱量準確,操作維護方便,自動化程度高,但是設備複雜,投資大,常用對產品要求比較高的場合。增量式計量的精度較高,是一種
理想的稱重方式,其缺點是投資比較高。我們設計的強製定量給料包裝機就釆用這種方式,保證稱量的精度要求。
(3)計數式計量方式對於顆粒狀物品,常釆用轉盤計數式計量方法進行計量。轉盤計數式計量裝置是利用轉盤上的計數板對產品進行計數。
容積式計量裝置結構簡單,操作方便,適應性廣泛,對於計量不要求很精確時,是首選方式。相對容積式計量來說,稱重式計量方法生產效率高,精度也較高,適用於比重變化比較大的物料。計數式計量,適用於有固定形狀的塊狀或顆粒狀物料。[38]
3.2稱量係統的組成
我們設計的強製給料定量包裝機釆用增量式稱重係統作為設備稱重係統,首先要建立增重式電子秤的力學模型,分析影響稱量精度的一些基本因素並提岀相應的解決方法。稱重機構是定量包裝機的關鍵環節,是保證物料包裝精度的關鍵所在。
此增重式稱重係統主要包括包裝袋、稱重傳感器以及稱重顯示儀表組成。料袋夾在楔形收料機構上,料袋內的物料的重量有收料機構傳給稱重傳感器,料袋內的物料的重量有傳感器經數模轉換器傳送到稱重顯示儀表。始稱量時,首先啟動螺旋輸送器的電機,料倉中的物料隨著螺旋軸的旋轉進入輸送器中,然後經過螺旋輸送器的旋轉軸將物料源源不斷的輸送到料袋中。當傳感器檢測到物料的實際重量滿足設定重量要求值時,關閉螺旋輸送器的電機停止下料。然後,當係統穩定後,控製電路使電磁閥通電,氣路得以導通,推動汽缸工作,夾袋機構鬆開料袋。料袋取走後,儀表自動歸零。
對稱量係統模型的研究,對研究稱量係統的特性是十分重要的。在這個工作過中稱量係統可以看做由"物料一收料袋機構一稱重傳感器一基礎”組成的一個振動係統,同時基礎的剛性遠大於其他結構的剛性,基礎對稱重係統的影響可以忽略不記,這樣稱重係統可以簡化為圖3-1這樣的結構:
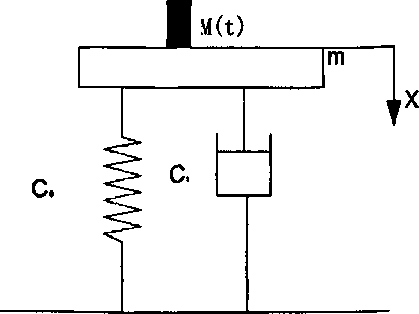
圖3-1稱重係統簡圖
Fig.3-1Weighingsystemdiagram
根據動力學分析,得出稱重的稱量係統數學模型:
[A/(r)+m]x+Gx+Cox=F(t)+ +m 式(3-1)
式中:m 收料機構重量(m)
M(t)—料袋中物料的重量(刀)
Co—稱重傳感器的剛度(N/m)
G—阻尼係數(Kg/s)
F(t)——料下落的衝擊力(N)
式(3.1)是位移x與重量[M(f)+%]的關係模型。由上式知,係統是一個時變非線性係統。當係統質量不變時,上式是典型的二階線性係統。
3.2.1稱重傳感器
稱重傳感器技術是電子稱重技術的重要基礎,稱重傳感器是電子稱重係統的核心部件。現代傳感器技術的發展促進了稱重技術的進步,現代製造技術、防護密封技術、微電子技術,計算機技術、網絡通訊技術的發展,又為開發新型傳感器提供了技術和物質基礎。隨著科學技術的迅速發展,要實現對物料的準確、快速、方便的稱量,稱重傳感器起著至關重要的作用。現在,傳感器幾乎運用到了社會所有領域。特別是現代自動檢測係統中,如果沒有傳感器,就無法檢測和控製生產過程中各個環節的各種參量,也就無法實現自動控製和檢測。在現代稱量技術中,傳感器實際上是現代測試技術和自動化技術的基礎。因此,稱重傳感器被稱為電子秤的心髒部件,他的性能很大程度上決定了電子秤的稱量精度。所以在選擇傳感器時應慎重,主要從以下幾個方麵考慮:網綱
1) 要考慮傳感器所處的工作環境。
電子秤所在的工作環境對傳感器的選擇是至關重要的,它關係到傳感器能否正常工作,使用壽命,在一定的程度上來說關係到整個電子秤的可靠性和安全性。
a) 在高溫環境下工作的設備,需要選用耐高溫的傳感器,另外必須加有隔熱、水冷或氣冷等裝置及溫度補償措施。
b) 在易燃易爆的環境下必須選擇防爆的傳感器,這種傳感器的密封外罩不僅要考慮其密封性,還要考慮防爆強度,以及電纜線引出頭的防水、防潮、防爆性
c) 在粉塵、潮濕的環境下應選擇封密性好的傳感器,從封密效果來看,焊接的封密為最好,充填塗覆密封膠為最差。對於室內幹淨、幹燥環境下工作的傳感器,可選擇塗膠密封的傳感器,而對於一些潮濕、粉塵性較高的環境下,選擇膜片熱套密封或膜片焊接密封、抽真空充氮的傳感器。在腐蝕的條件下選擇外表進行過噴塑或有不鏽鋼外罩,抗腐蝕性能好且密封性好的傳感器。
d) 電磁場對傳感器輸出信號幹擾的影響,在此情況下,應對傳感器的屏蔽性能進行嚴格的檢査,看是否有良好的抗電子輻射能力。
2) 對傳感器數量和量程的選擇
a) 傳感器量程的選擇是依據秤的最大量程,選用傳感器的個數、可能產生的最大偏載及動態等因素綜合評價來確定傳感器的量程。一般來說,傳感器量程與所受最大載荷越接近,其稱量的精度就越高。但是在實際使用時,由於加在傳感器上的載荷除被稱量的物體外,還有秤體的自重、皮重、偏載及振動衝擊等載荷的存在,因此在選用傳感器量程的時候,要考慮諸多方麵的因素,不僅保證精度,同時還要保證傳感器的安全和壽命。
b) 感器的數量的選擇是根據電子秤的用途、秤體需要支撐的點數(支撐點數應以秤體的幾何重心和實際重心重合為原則)而定。一般來說,秤體有幾個支撐點就有幾個傳感器,但是對於一些特殊的秤體,如電子釣鉤秤,就隻能用一個傳感器,一些機電結合秤就應根據實際情況來確定選用傳感器的個數。
3) 傳感器準精度等級的選擇
傳感器的準確度等級用非線性、滯後性誤差、重複性誤差、蠕變、零點溫度附加誤差以及額定輸出溫度附加誤差6項指標中的最大誤差,來確定稱重傳感器準確度等級,分別用0.02、0.03、0.05……1.0表示。稱重傳感器的性能指標主要有線性誤差、滯後誤差、重複性誤差、蠕變、零點溫度特性和靈敏度溫度特性等。對傳感器準確度等級的選擇必須滿足下列兩個條件;
a) 滿足模擬量處理模塊的輸入要求。其對傳感器的輸出信號經過放大、A/D轉換等處理之後顯示稱量結果的。因此,傳感器的輸出信號必須大於或等於模塊要求的輸入信號大小,即將傳感器的輸出靈敏度代入傳感器和處理模塊的匹配公式,計算結果必須大於或等於處理模塊要求的輸入靈敏度。
b) 滿足整台電子秤準確度的要求。在對傳感器準確度選擇的時候,應使傳感器的準確度略高於理論計算值,因為理論往往受到客觀條件的限製,如秤體的強度差一點,模擬量處理模塊的性能不是很好,秤的工作環境比較惡劣等因素都直接影響到秤的準確度要求,因此要從各方麵提高要求,又要考慮經濟效益,確保達到目的。
4) 稱重顯示儀表是對傳感器的輸岀信號經過放大、A/D轉換等處理之後顯示稱量結果。所以,釆用的傳感器滿足儀表輸入靈敏度的要求,能夠與所選儀表匹配。而一台電子秤主要由秤體、傳感器、儀表三部分組成,在對傳感器的選擇的時候,應使傳感器的準確度高於理論計算值,因為理論值往往受到客觀條件的限製,如秤體強度稍差、儀表性能不太好、電子秤的工作環境惡劣等因素直接影響到秤的準確度要求,因此要從各個方麵提高要求,又要考慮經濟效益,確保達到目的【4七
稱重傳感器從按轉換方法分為光電式、液壓式、電磁力式、電容式、磁極變形式、振動式。陀螺儀式、電阻應變式等,其中以電阻應變式使用最廣。本係統選用電阻應變片式稱重傳感器。
3.2.2電阻應變片式稱重傳感器
電阻應變片式稱重傳感器的工作原理為:彈性體在外力作用下產生彈性變形,使黏貼在它表麵的電阻應變片也隨同產生變形,電阻應變片變形後,它的阻值將發生變
化(增大或減小),再經過相應的檢測電路把這一電阻變為或轉換為電信號(電壓或電流),從而使稱重係統完成將外力轉換為電信號的過程。彈性體、電阻應變片和檢測電路是電阻應變式稱重傳感器中不可缺少的幾個主要部分。
1) 彈性體
彈性體直接感受力、壓力和力矩等物理量,其輸出為彈性元件本身的變形(應變、位移、轉角)。這種變形通常作為電阻式、電容式、電感式、霍爾式等元件的輸入量,以作進一步的信號變換。通常以剛度、靈敏度、彈性滯後、彈性後效、溫度特性作為基本特性來衡量彈性體的性能。
2) 電阻應變片
電阻應變片又稱電阻應變計,是將應變變化變換威電阻變化的電阻元件。種類很多,常見的有箔式電阻應變片、半導體應變片和絲式電阻應變片。以金屬材料為轉換元件的應變片,其轉換原理是基於金屬電阻絲的電阻應變效應。
3) 檢測電路
在稱量過程中,要把稱重傳感器承載的重量信號轉換為人們能夠認識、方便操作的電量信號,檢測電路的作用就是把電阻應變片受承載產生的電阻變化轉變為電壓輸出。因為惠斯登電橋具有很多優點,如可以抑製溫度變化的影響,可以抑製側向力幹擾,可以比較方便的解決稱重傳感器的補償問題等,所以惠斯登電橋在稱重傳感器中得到了廣泛的應用。圖3-2所示惠斯登電橋電路。
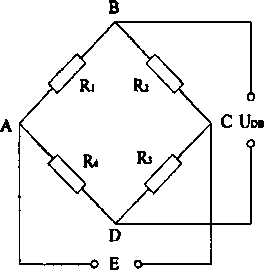
圖3-2電橋電路
Fig.3-2Electricbridgecircuit
如圖3-2所示的電橋電路中,當&、&、&、&都為電阻應變片時,該電橋稱為全橋;當其中之一為電阻應變片、其它為固定電阻時,則該電橋稱為單橋。全橋的靈敏度是單橋的四倍。當&=&=&=&時,稱為全等臂電橋。因為全等臂電橋的靈敏度最高,各臂參數一致,各種幹擾的影響容易相互抵消,所以稱重傳感器均釆用全橋式等臂電橋。
在全等臂電橋中,&、&、&、&四個電阻依次接在A、B、C、D之間,構成電橋的四橋臂。電橋的對角線AC兩端接電源,電源電壓為E;對角線BD兩端為電橋的輸出端,其輸出電壓用0酣表示。可以證明U班與橋臂電阻有如式(2-22)關係
UDB=E( —) 式(3—2)
DBR+L&+&
若4個橋臂電阻由貼在構件上的4枚電阻片組成,而且初始電阻&=&=&=R,當輸出電壓〃財=0時,電橋處於平衡狀態。構件變形時,各電阻的變化量分別為從|、場、A&、媽。輸出電壓的相應變化為:
在小應變M/RD1的條件下,可以證明橋路輸出電壓為:
如果M僅由機械變形引起、與溫度影響無關,而且4枚電阻片的靈敏係數&相等時,根據式(2-21)和(2-24)可以寫成
E
AUdb=~EK°(£]-勺+$3,4)
如果拱橋電壓E不變,那麽構件變形引起的電壓輸出AU°b與4個橋臂的應變值勻、電、弓、&成線性關係。利用電橋的這一特性可將電阻的變化轉換成電壓的輸出。
3.3稱量誤差分析
由前邊的式3-1可知,稱量的力學模型是隨著下料過程變化而斷變化,而位移x作為非線性時變係統的輸出,受多種因素的影響,這其中包括給料的質量、下料時物料對係統的衝擊力以及稱量係統本身的機械特性,同時還有送料係統停止後空中落料量以及螺旋送料過程的脈動現象的影響。
下料時物料對稱重係統產生的衝擊力隨下料速度和物料衝擊係統的速度不同而改變,很難準確的估計和計算。空中物料的質量與物料的下落高度(螺旋輸送器的出料口到料袋中物料麵之間的距離)差、給料速度和執行機構延時等因素有關,同樣也很難算出。
3.3.1加料誤差
送料生產中發生的周期性的變化我們稱為送料過程中的脈動現象。螺旋機構送料過程中,在一個螺距的送料過程中,產生物料流不均勻料現象稱為送料的“脈動現象”。加料誤差主要是由螺旋輸送器的結構狀況和物料的不均勻性引起,產生送料過程的脈動現象。
3.3.1.1脈動現象分析
螺旋輸送器作為一種強製給料的連續給料設備,具有結構簡單、緊湊,價格低廉,係統封閉等特點,使其在物料的輸送中使用十分廣泛,特別是在粉狀物料和具有一定的粘性的物料的輸送中更是得到廣泛應用。其基本原理是利用螺旋的旋轉將物料送出。
試驗發現,螺旋機構送料過程中,在一個螺距的送料過程中,會產生物料K8凯发登录入口的不均勻現象,我們稱為螺旋送料的“脈動現象”,分析其產生原因,主要是受螺旋終止端麵的影響。由於在卸料口,螺旋葉片轉動到不同的位置時,螺旋與料筒形成的存料空間不同,並且當螺旋的端麵運動到不同的位置時,物料受阻擋的情況不同,因此產生了落料的差異。由於自身的特點,在一個螺距的送料過程中產生送料多少不均的脈動現象,脈動現象主要由螺旋的螺距,直徑和物料的堆積密度的影響。
螺旋給料器的給料精度除了螺旋自身的因素外,還受物料本身的物理、化學性質的影響。影響給料精度的主要物料性質有:流散性、可壓縮性、比重、粘度、粘滯性等。
3.3.1.2提高給料精度措施
我們通過螺旋輸送器螺旋輸送某一物料的試驗,來分析螺旋輸送的“脈動現象”。其方法是螺旋每轉動30°角,測量出流出的物料K8凯发登录入口,順序做出0°—30°、30°-60。、60°-90°等,直至整個圓周的物料K8凯发登录入口。再計算出每個測量單元的平均值,繪製了送料的曲線圖如圖3-4所示。
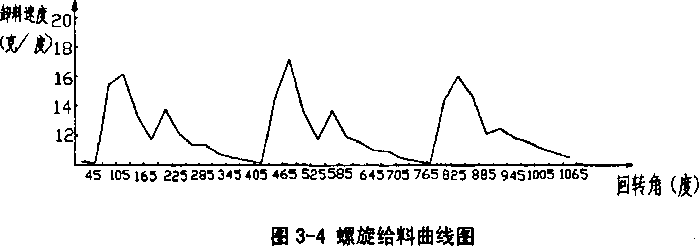
Fig.3-4Spiralsendblankinggraph
脈動現象將不僅影響給料精度,同時影響給料的均勻性,使生產線上的設備不能均衡生產,特別是當定量螺旋給料機尺寸大、能力大,而生產線生產量小的情況,影響更加明顯。另外,如果將定量螺旋給料機用於配料作業,或用於定量包裝機給料,影響將更大。如果在定量包裝機的一個工作循環過程中,定量螺旋給料機旋轉次數越少,脈動影響越大,給料誤差越大;反之,則給料誤差越小。因此,對於定量包裝機和自動配料機,應盡量提高在一個工作循環內的螺旋旋轉給料次數。
我們通過將出料口處的螺旋設計成雙螺旋,這樣就相當於在旋轉一個圓周有兩次送料機會,使給料次數增加了一倍。同時兩個螺旋送料的峰值和穀值可以互補,大大提高了給料的均勻性。圖3-5是我們使用出料口為雙螺旋結構的給料機構輸送同樣中物料的曲線圖。
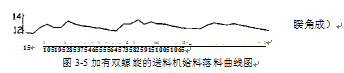
圖3-5加有雙螺旋的送料機給料落料曲線圖
Fig.3-5Withthedoublespiralfeederofgraph
從圖3-4,3-5比較來看,采用雙頭螺旋給料機構給料時,可以大大的降低螺旋給料的脈動,提高給料的均勻性,應用於定量包裝時可以提高包裝精度。
同時,使用螺旋給料機構送料時,在物料性質一定的情況下,通過以下幾個方麵可以提高給料機構的給料精度。
1) 電動機轉速穩定:
穩定的電動機轉速是螺旋給料機構保證給料精度的首要方麵。使用普通電機,電機的轉速受電壓變化的影響比較大,一些未考慮電機轉速的影響的設備,送料的精度波動比較大;采用穩壓器的設備,可以降低電壓的波動,從而降低電機轉速的變化,提高送料精度。現在一些給料設備采用變頻電機或者伺服電機,結合閉環控製係統,可以很好的解決電壓變化對給料精度的影響。
2) 螺旋的填充係數穩定
螺旋輸送機作為輸送設備在定量包裝機中應用,與普通的螺旋輸送相比,主要是保證了送料時螺旋的填充係數為定值,這樣就保證螺旋在轉動一個螺距時流出的物料不變。同時,螺旋的填充係數越穩定,在螺旋的一個螺距送料過程中產生的脈動越小。因此,在設計給料設備料倉時,應選擇合理的料倉形狀結構,使螺旋的填充係數盡可能的穩定。
3.3.2空中物料的誤差
電子秤的稱量精度還與喂料階段的軟件處理有較大的關係,特別是空中落差的處理,這是稱重係統軟件設計的關鍵。
一般增量式稱重方式使用稱量鬥接收物料,物料稱完後,將稱重顯示儀表內部計數值清零。在料鬥內的物料重量達到定值時,給料設備停止給料,但是在給料機構和料鬥內料麵之間還有一部分物料以自由落體運動經一段時間後才能落入稱量料鬥內,這部分料稱為空中落料差。由於空中落料差的影響,所以物料的重量的設定值應為稱量目標值減去物料落差值。
空中落差值是影響稱量精度的一個重要因素,必須對落料量進行補償。落料量的積分公式為:
Wd=^+ha(t)dt 式(3-6)
其中,為送料機構停止時間,匕為物料自由下落距離h的時間。設落差距離為方,落料的垂直初速度為0,則g為重力加速度,a(t)為物料的K8凯发登录入口。a(f)可用下公式表示:
a(t)=\3AD2(/SYn(t) 式(3-7)
式中,«(/) 料K8凯发登录入口(kg/s)
D—螺旋輸送器的直徑(m)
Y—料的容積(Kg/m3)
4> 填充係數
S 螺距(m)
n(t) 螺旋轉速(r/s)
令c^\3AD2(/SY則a(t}=cn(t}
假設螺旋機構的轉速n不變,落料差高度為h,則物料落差量為:
Wd=-^^cn 式(3—8)
由上式可知,當物料的落差高度h不變時,物料的落差量主要受螺旋下料機構的轉速影響。降低螺旋機構的轉速也就減少了物料的落差量。
同時,料袋內料位的高低會產生下料受力不均的現象,料袋內隨下料增多料位不斷的增加,從而h值不斷變化,下料的快慢也不斷變化,這些都會使空中落料差產生變化。另外,稱重儀表的反映速度,下料的平穩性都會對稱重結果產生很大的影響。
由上分析可知,螺旋給料機停止給料後,由高度落差(給料機與料鬥之間)引起的空間物料的不確定性是影響最終物料稱量精度的直接原因。
設計中的料門可以減少物料的落差高度,減少空中落料量,提高包裝精度。
3.33衝擊力的誤差
衝擊力主要是因為物料從螺旋輸送器的出料口下料時,從卸料口到料袋內料麵有一定的距離h,從而產生的衝擊力。衝擊力對稱量的穩定性和精度有一定的影響。
由動量定理知:
F^t=mv 式(3—9)
式中,m為A/時間內物料的下料量,設a(f)為物料的K8凯发登录入口,所以可以改寫為:
m=a(t)xA/ 式(3—10)
設v是物料恰好落到料袋內料麵時的垂直速度,有
v=朗=g[枠=式(3—11)
式(3—⑵
將a(t)=cn(t)代入得
F=cn(t)x麗 式(3-13)
由上式可以知,物料的衝擊力與螺旋給料機構的轉速及物料落差高度有關。為減少衝擊力的影響,可以降低螺旋的轉速或者減少物料落差高度。
這樣物料的下料量就等於稱量傳感器的測量值加上落差量,然後減去物料的衝擊力,即:
W^Wc+Wd-F 式(3-14)
在設計時,釆用大小螺旋給料,同時小螺旋卸料口端設計成雙頭螺旋形式,這樣保證給料速度同時,在精給料時,保證了給料的均勻性,使物料的衝擊力更均勻,降低了衝擊力對稱量精度的影響。
3.3.4傳感器的遲滯性誤差
以圖3-4為模型介紹遲滯性的定義:縱軸為靈敏度輸出,橫軸為載荷,在測試傳感器的特性時一般將額定載荷等分成五份,從0到100%逐級加載並讀取相應的輸出值,將五個讀數點連成光滑曲線,這條曲線如圖中粗實線,稱之為加載曲線,也叫進程曲線。利用直線插入法計算75%點的相應數據,以零點和75%點劃一條直線,圖中點線,這條直線稱為理想直線,加載曲線與理想直線的誤差稱之為非線性誤差。從100%到0分五等份逐級減載,並讀取相應數據,將這五組數據連成光滑曲線,如圖中粗虛線,稱之為減載曲線,也叫回程曲線,減載曲線與加載曲線之間的誤差稱之為遲滯性誤差。
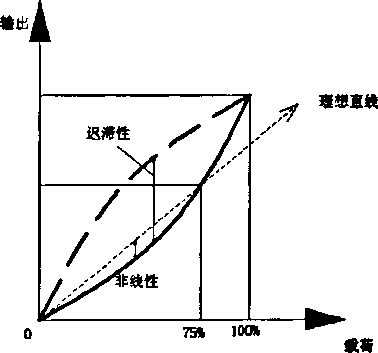
圖3-4遲滯性曲線圖
Fig.3-6Hystereticcurvediagram
遲滯性誤差反映的是傳感器精度的主要指標之一,誤差的大小直接影響計量精度,所以在傳感器的生產過程中必須嚴格控製影響遲滯性的各種因素。同時也要保證在安裝傳感器的不同條件下盡量避免影響遲滯性的因素存在。影響傳感器遲滯性的因素主要有以下幾個方麵:
1) 傳感器本身結構,包括彈性體、應變計、密封膠等因素的的影響。
2) 安裝條件的影響,主要是指稱重傳感器在使用現場的安裝條件,如表麵狀況、安裝扭力、螺栓強度等均會影響稱重傳感器或者說是整機的遲滯性。
上述的影響因素,或多或少都會影響使用精度,在安裝過程中盡量避免,以保證係統的長期使用的穩定性能。
3.4隨機誤差
隨機誤差的產生取決於測量過程中一係列隨機性因素的影響。所謂隨機性因素是指試驗者無法加以嚴格控製的因素。在測量過程中,盡管測量條件不變,但由於一些不可預測的隨機事件的影響,多次稱重的結果仍然有差異,這就是隨機誤差。例如環境誤差的影響:周圍的振動引起配料係統不穩定,導致釆集到虛假數據;電磁幹擾的影響;其它如粉塵、煙霧、潮濕、高溫、噪聲對係統的影響等"J。
消除隨機誤差的方法為多次測量取平均值。
3.5本章小結
本章主要介紹了定量包裝機的稱量係統。分析了影響稱量精度的因素所產生的誤差,包括傳感器的誤差、加料誤差、物料下落產生的衝擊力誤差、空中物料所帶來的誤差、係統遲滯性誤差、過衝量誤差、隨機誤差等,並提出了相應的解決方案。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器