谘詢電話
ENGLISH0755-88840386智能儀表非線性自動校正方法研究
發布時間:2020-10-12 14:09:55 |來源:
0引言
智能儀表的模擬輸入通道一般由傳感器、前置放大電路、有源濾波器、采樣保持電路(S/H)、A/D轉換器和微機係統等電路組成⑴。由於電子元器件性能參數的髙散性、穩定性和溫度敏感性等問題,目前還得不到根本的解決。因此,從傳感器到A/D轉換之間的任何一個環節都存在非線性的問題,使得A/D轉換值n與被測量,不成線性關係,即e磚ax+b(a、b為常數)⑵。如果不解決這種非線性問題,將會嚴重影響智能儀表的測量精度。常用的非線性校正方法有校正函數法、查表法和模型校正法。
①校正函數法要求傳感器的輸入/輸出特性能用數學解析式表示,且輸入通道的其它環節可認為是線性的。事實上,很多傳感器的輸入/輸岀特性很難用解析式表示,並且如果解析式計算太複雜,還會嚴重影響測量速度。因此,校正函數法的應用受到較大的局限⑷。
②査表法必須針對每一個傳感器進行校正,而且需要把大量的校正數據製成表格存入儀表內存。而~般的智能儀表的內存非常有限;當因故更換傳感器時,需要重新校正、修訂內存中的表格數據,應用起來也非常不方便⑴。
③模型校正法的基本原理是設法找到一個近似函數g(x)或多個分段近似函數g,(x)屈3)臏)、g’G)等來代替原函數/(x)o模型校正法的關鍵是如何求出既能滿足精度要求,又能滿足計算簡單的校正模型。通常校正模型計算太複雜會影響測量速度,所以采用模型校正法進行非線性校正時,往往釆用離線處理的方式成。
智能儀表的特點是:采用的微控製器通常不便於進行複雜的計算,內存也非常有限,而且很多情況下實時性要求高,不允許離線校正。因此,尋找到一種簡便、有效、通用的非線性自動校正方法,具有非常重要的意義。
1非線性自動校正算法
采用分段直線方程的非線性校正原理如圖1所示。設儀表的被測量用*表示,儀表中對應的A/D轉換值用N表示,則曲線0M表示儀表的非線性特性曲線。現將曲線分成若幹段,如果分段點的位置和分段數選取合適,則每一段曲線可近似看成是一直線段。這樣,曲線就可看成是由若幹宜線段組成。如圖中虛線段AB^BC可分別近似表示曲線曲和曲線BC。
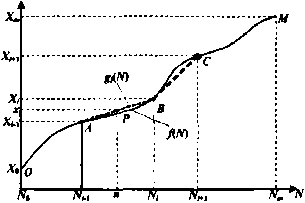
圖1非線性校正原理
Fig.1Principleofnonlinearcorrection
圖1中:曲線OM分段後各段端點對應的被測信號分別為X。AA,…,Xf,x.Xz,…,x.;儀表中對應的A/D轉換值分別為N°,N\,Nz,…,Nz,N“Ne,…,Nq其中,臨為被測量的最小值,X為被測量的最大值。顯然線段48的斜率為:
曲線段上的點(n/(n)),可用直線段AB上的點P(n,x)近似表示,而點P滿足:
i=l,2,3,…,m, (2)
將式(1)代入式(2),則有:
(f(Xf
叫-Ni
式(2)、式(3)就是得到的分段直線校正方程。其中式(2)可稱為點斜式校正方程,因為校正方程由線段上的端點(W,_“X,f)和斜率如決定;式(3)可稱為兩點式校正方程,因為校正方程由線段上的兩端點(凡_|遇3和(叫周)決定。
在校準時,若釆用點斜式校正方程,則依次把校正方程參數(NtAj)和佑(其中i=l,2,3,-,m)存入儀表的內存;若釆用兩點式校正方程,則依次把校正方程參數(N,,X,)(其中i=0,1,2,3,…,m)存入儀表的內存。在實際測量時隻要先用程序判斷儀表當前的A/D轉換值N位於哪一個直線段,再從儀表內存中取出相應直線段的校正方程參數,則可由校正方程求岀相應的測量值X。
從校正方程可以看出,測量值隻與校正點的測量數據有關,而與包括傳感器在內的模擬輸入通道的各環節的非線性並無直接關係。因此,隻要儀表的重複性或穩定性較好,即在不同時刻測量同一被測量X時,得到的A/D轉換值N始終或基本保持不變,不論非線性是由於傳感器還是因為模擬輸入通道的其它環節引起的,都可以達到非線性校正的目的,從而保證儀表的測量精度。理論上講,分的段數越多,儀表的測量精度就越高,但相應地,占用儀表的內存也越多,測量速度也會有少許影響,校準時也會稍微複雜。
需要指出的是,各種智能儀表存在較大的差異,實際應用中要視具體情況對非線性校正方程進行必要的修正。
2在稱重儀表中的應用
在電子衡器中,廣泛采用的稱重傳感器是壓力或拉力傳感器。不論傳感器的量程多大,其滿度輸出一般為2mV左右,因此,對於同一種類型(靜態或動態)的電子衡器而言,往往可以采用通用的稱重儀表。
電子衡器尤其是商用電子衡器,不儀對稱重精度有很高的要求,而且對實時性也有較高的要求。因此,稱重儀表的非線性校正必須采用在線方式。
2.1非線性自動校正方程的修正
在稱重儀表中,最小測量值Xo=Okg,對應的零點值"0,而且會隨著環境溫度的變化而變化,實際測量時,各校正點X,對應的A/D轉換值=1,2,3,…)也會因零點的變化而相應發生變化。也就是說,環境溫度變化後,實際測量時,當被測量為X時,儀表內部獲取的A/D轉換值不再是校正時的N,.,從而使得按上述校正方程式(2)或式(3)求取的測量校正值是錯誤的或不準確的。
實驗證明,稱重儀表的零點值畦受環境溫度的影響較大,而其非線性特性曲線受環境溫度的影響較小⑺。如圖1中所示,M發生變化後,可以近似認為非線性特性曲線0M隻是適當左移或右移。也就是說,盡管叫,是變化的,而M-叫("1,2,3,…)可以認為是不變的。
一般來說,每天的不同時刻都會存在一定的溫差,但每天的溫度變化都非常緩慢,稱重儀表的零點在使用過程中的變化也非常緩慢。根據這個特點,我們完全可以用軟件的方法實現零點跟蹤,即在某個較短的時間段0.58)內,若采樣到的A/D值n與彳前的零點此之差的絕對值不超過某個較小的數值,則冬M=no
鑒於儀表的零點值總受環境溫度的影響較大,非線性校正方程要作相應的修正:不管是校正時還是實際測量時,均把得到的A/D轉換值減去零點值M。此時,點斜式校正方程修正為:
2.2校正方程參數的存儲結構
對於點斜式校正方程式(4)而言,要存入儀表內存的校正方程參數為:叫t、Xe和紂i=1,2,3,…,m;凱=X°=0),可用一個三維數組形式的表格存放。
對於兩點式校正方程式(5)而言,要存入儀表內存的校正方程參數為:M"9=0,l,2,3,・”,m;M,=X。=0),可用一個二維數組形式的表格存放。
考慮到M°=X°=0,故刈和&不必保存,但應在表首位置存儲校正點數爲兩個校正方程的校正參數在儀表內存中的存儲結構分別如圖2所示,其中Tab.1和Tab.2分別表示內存參數表首地址。
兩點式要做一次乘法運算和一次除法運算。考慮到:計算斜率庇時,為了保證測量精度,小數點後需要保留足夠的位數,視具體情況而定;而智能儀表中采用的微控製器通常不方便做小數乘法運算,而且位數越多、運算越耗時;另外,當分段數大於3時,點斜式比兩點式所需內存空間要多。因此,對於在線實時校正的智能儀表來說,采用兩點式校正方程往往更合適一些。這裏選用式(5)作為校正方程。為了描述時區分校正方程中的變量和儀表內存中存儲的校正參數,對校正方程做如下變量代換,令a=X「i,b=X,,c=材i,d=此,則校正方程式(5)變為:
稱重計量時的非線性校正要解決以下三個問題。
①如何找出N位於哪一個直線段,考慮到校正點數不會太多,可采用簡單的順序查找法。
②在沒有進行校正前,儀表如何顯示實測重量。
按全量程線性處理,即把量程的最大值X作為唯一校正點,但校正點數j記為0,表示未進行過校正。因此,儀表內存參數表初始化時J處保存0、吃處保存N“-N°、X,處保存,和£是可以預知的,而且也可以估算出來或通過實測獲得。
③當實際稱量物體的重量超過最大校準點重量時,儀表如何顯示實測重量。
按最大校準點求得的校正參數進行校正。
2.3非線性自動校正
稱重儀表(電子衡器)的校準過程如下:
①在稱重儀表預熱後,按〈校準〉功能鍵(為安全起見,可要求輸入一串驗證碼),進入校準狀態,此時儀表按原校準參數顯示重量值;
②稱量重量為Z的標準球碼;
③從儀表鍵盤輸入標準雖碼重量值Z,完成一個點的校準,此後儀表按新校準參數顯示重量值;
④增加砥碼重量,重複第②~③步,直到按<完成校準〉功能鍵(為安全起見,可要求輸入一串驗證碼)結束校準。
該流程限定了每次校準時隻能從小到大依次進行,並且隻要校準了一個點,上一次的校正參數將不複存在。考慮到大量程電子衡器校準工作量非常大,而校準點數較多,校準過程中難免有輸入差錯,為了避免在校準的後期因差錯而要推倒重來,可以將該算法稍加改進,允許取消當前的校準點參數,以便對該點重新校準。一般來說,可以選擇衡器規定的檢定點作為校準點。
3結束語
采用分段直線方程的非線性自動校正算法本質上屬於模型校正法,但該算法並不是單純從解決傳感器等某個環節的非線性問題著手,而是著眼於解決智能儀表中整個模擬輸入通道的非線性校正問題。其主要特點是實現了智能儀表非線性的在線自動校正,校正模型簡單、校正參數容易獲取、通用性好,在智能儀表中具有廣泛的應用價值。
在稱重儀表中的實際應用表明,該算法簡單、實用、方便實現、使用效果良好。
文章來源於網絡轉載,侵刪
- 上一篇:直流電子稱重儀表輻射抗擾度測試
- 下一篇:自動包裝秤稱重機械結構的優化分析
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器