谘詢電話
ENGLISH0755-88840386動態電子軌道衡稱重原理分析
發布時間:2020-10-19 13:39:16 |來源:
電子軌道衡作為鐵道車輛稱重使用的電子稱重設備,目前在國民經濟中應用越來越廣泛。電子軌道衡有靜態和動態兩種工作方式,工作原理基本相同,都是稱重傳感器感應由機械台麵傳來的物體重量信號,並按一定的比例關係轉換成與其重量相對應的電信號,再通過二次儀表進行信號處理,最終在計算機上顯示車輛的重量數值。電子軌道衡稱重具有反應速度快、精度高、體積小、自動化程度高、維護方便等諸多優點。其中動態過磅的動態電子軌道衡,有著過磅速度快的特有優點,受到許多用戶的青睞。結合江西銅業集團公司永平銅礦的基坑型、單台麵、以轉向架為計量方式的電子軌道衡,分析動態電子軌道衡的工作原理。
1稱重原理分析
電子軌道衡一般由機械台麵(或傳力機構)、傳感器、二次儀表和計算機(顯示裝置)四部分組成,其稱重信號處理順著這四部分自上而下逐步進行,這也是一般電子稱重設備的信號處理流程。下麵對這四個部分工作原理逐一加以分析。
1.1機械台麵
軌道衡的機械台麵係統要求有足夠的剛度和強度,同時必須做到傳力準確。在結構上,主要由台麵鋼軌、過渡器、限位器、承重梁組成。台麵鋼軌和過渡器安裝在承重梁上,直接與車輛輪對相接觸。限位器是必要的輔助裝置,起限製整個秤架擺動的作用。承重梁則在車輛與傳感器之間起到力的傳遞作用。
1.1.1台麵軌
對台麵軌有物點要求:(1)台麵軌與其兩端各長15m的引軌要在同一水平線上。引軌必須筆直,其基礎要十分牢固,不能有鬆動。如果台麵軌與引軌不在同一水平線上,而是存在坡度,過磅車輛的重心線必將偏離本來的位置,產生稱重誤差。(2)兩根台麵軌要在同一水平麵上。這樣可避免車輛輪對對鋼軌產生側向力而影響重力的傳輸,同時也是傳感器正確使用的前提條件。
1.1.2過渡器
弓I軌和台麵軌之間存在著縫隙,如果不加處理,則車輛進出台麵時會對台麵產生較大衝擊,影響稱重精度,並且很容易損壞傳感器。過渡器是台麵和引軌的聯接軌,它用來減少鋼軌接頭衝擊所引起的振動。過渡器一般安裝成隨動橋式的,並且保持靈活。其外形一般做成頂部縱向成弧形,最高點高出台麵軌車輪經過過渡器時,自然會繞過橫向軌縫,從而有效減少衝擊振動。
1.1.3限位器
限位器對動態軌道衡來說是至關重要的部件,它對感量和稱量值有直接的影響。這是由於車輛進入和離開台麵會對台麵產生衝擊,車輪與鋼軌之間也存在動摩擦,使承重梁產生擺動,影響力的傳輸。為了限製承重梁的擺動幅度,必須使用縱向和橫向的限位裝置。其一端固定在基坑上,另一端控製承重梁的位移。限位器的狀態不能太緊或太鬆。太緊會使整個秤的靈敏度降低,;太鬆會使傳感器的側向力加大,具體表現為數據分散,變差加大。永平銅礦軌道衡使用了四根縱向拉杆和四根橫向拉板進行限位,拉板的鬆緊程度可由螺栓調整。
1.1.4承重梁
承重梁不與基坑相連,是懸空的,靠限位拉杆固定在傳感器上,其自身重量全部由傳感器承受。承重梁要保持靈活,才能將車輛的重量無損失地傳遞給傳感器。
1.2傳感器
傳感器是電子稱重設備中完成力一電轉換的關鍵部件,也是影響稱重精度的主要部件。傳感器安裝在承重梁的底部,固定在一塊可調高度的墊鐵上。通過調整墊鐵,可以調整台麵的水平麵。傳感器的力一電轉換精度很高,一般在0.5%~0.01%。在電子稱重中普遍采用的是稱重傳感器。
1.2.1轉換原理
傳感器的力一電轉換是利用傳感器內部的金屬絲(即電阻應變片)在受壓發生彈性變形時,其電阻值也產生相應變化這一物理性能進行工作的,這一特性稱為電阻的“應變一電阻效應”。電阻應變片外形及其在傳感器內部的位置見圖1所示。
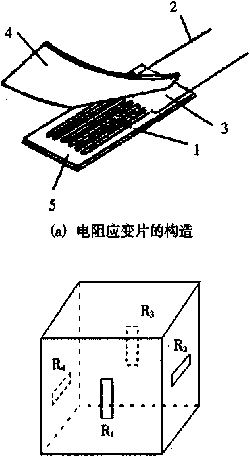
(b)傳感器內部的應變片
圖1電阻應變片
Fig1Resistancestrainpiece
1-敏感柵;2-引線;3-粘結劑;4-蓋層;5-基底
電阻應變片:用粘合劑粘貼在金屬彈性元件表麵,在橫向和縱向上都粘貼有兩片,並接成橋式測量電路,如圖2。如果在彈性元件上加上重量W,電阻應變片隨同彈性元件一起變形,應變片的阻值將發生變化。通過測量阻值的變化,就可間接得到外加重量W的值(一般是測其輸出的電壓值)。圖3是傳感器安裝結構示意圖。
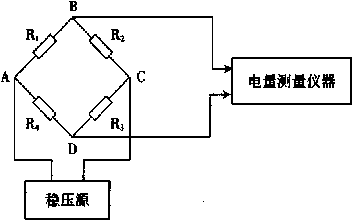
圖2電阻應變片測量電路
Fig2Themeasurecircuitofresistancestrainpiece
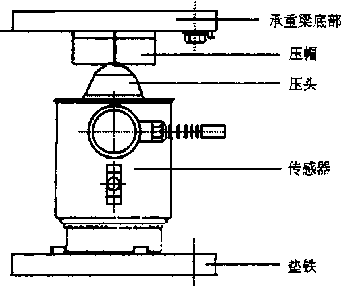
圖3傳感器安裝結構示意圖
Fig3Theinstallingstructuresketchofloadcell
1.2.2電路聯接原理
轉向架計量方式的動態電子軌道衡使用了四隻20t的柱形傳感器共同支撐稱重台麵,能稱量100t的鐵道車輛。為得到各個傳感器輸出信號的總和,四個傳感器橋路采用了並聯的聯接方式,用24V直流恒壓源激勵,如圖4所示。
由於采用的是同一型號的稱重傳感器,其輸出阻抗基本一致,故橋路輸出總電壓Ua為各個橋路輸出的算術平均值:
站(S+U站韓+U翕4
圖4中,E為傳感器激勵電源電壓,並聯後輸出信號為0,各傳感器的輸出電阻為R如靈敏度為島,輸出電壓為仏,載荷容量為G,根據疊加原理有(把J?,、&看成短路),有:
其中朋/G,而K,=S/(冊G)稱為傳感器特性係數,月為各磚感器上分別承受的重量。
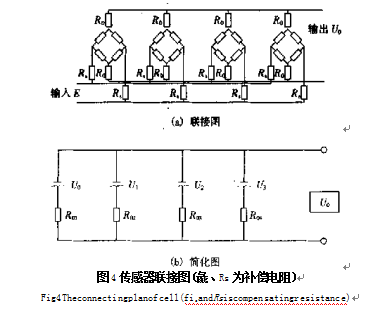
僅與傳感器上的總重量成正比,而與各傳感器的受力狀況無關,條件是各傳感器的特性係數要一致,即四隻傳感器的靈敏度、輸出電阻、載荷容量相同。可以在每個傳感器的兩輸出端各串接一隻低溫係數的電阻%,這樣能減少因傳感器輸出阻抗不等而影響傳感器的總輸出。
1.2.3稱重傳感器的特性參數
稱重傳感器的主要性能參數有:額定載荷、輸出靈敏度、非線性、蠕變、滯後.、重複性、零點輸出、零點漂移、輸出溫度影響等。由於製造傳感器的技術不斷進步,在實際應用中,通常隻需考慮靈敏度、滯後、重複性和非線性對稱重的影響。下麵介紹其中一些基本概念。
靈敏度:指額定載荷下,供橋電壓為IV時的輸出電壓(mV/V);若傳感器靈敏度係數不一致,則同一物體置於稱台的不同位置,就會顯示不同重量,從而影響稱重精度,其原因前麵已論述。
滯後:傳感器的滯後誤差對稱重的影響較大。當輪對進入台麵後,前兩個傳感器的載荷最大,然後逐漸減少,使用加載曲線段;而後兩個傳感器的載荷逐漸增加,使用卸載曲線段。當加載曲線段和卸載曲線段不重合時,會給輸出引入較大誤差。滯後誤差較大時,一般隻有更換傳感器。
重複性:表現為某一稱量點重複稱量的誤差。這是一個隨機的量,在應用中很難消除它的影響,合格的傳感器的重複性誤差很小,不會影響使用精度。
非線性:會影響某一稱量段的稱重。表現為一個係統誤差,可以在數據處理中進行補償。
1.3二次儀表
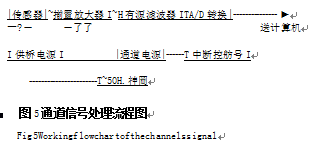
二次儀表對傳感器輸出的模擬信號進行放大、濾波處理,並進行A/D轉換,然後將數據輸出給計算機進行數據處理。二次儀表我們也稱作通道。通道對傳感器的信號處理不好,會直接影響稱重準確度。圖5是通道電路原理圖。
1.3.1前置放大器
傳感器輸出的信號為毫伏級,輸出靈敏度一般為l~3mV/V。軌道衡傳感器使用的是24V供橋電壓,其最大輸出為24mV,電信號比較弱。二次儀表在信號處理前,必須對傳感器輸岀的電信號進行放大。放大器要求輸入阻抗大,漂移小,增益高,噪聲低。永平銅礦軌道衝采用進口的高精密放大器ICL7650作為前置放大器。放大倍數約為100倍。
放大器的放大倍數應與傳感器及A/D轉換器相匹配。可以計算出二次儀表應有的放大倍數。由於傳感器的靈敏度為ImV/V,供橋電壓為24V,那麽在額定載荷20t的作用下單個傳感器的輸出電壓為:
t/o=24VxlmV/V=24mV
此24mV代表20000kg的重量,則每kg表示的電壓為:
^1=24mV/20000kg=0.0012mV/kg
而A/D轉換器ADC1130是14位的,最大輸出數值為3FFFH,代表著16383kg的重量值,這是四個傳感器感應重量的平均值。由於A/D轉換器的滿量程輸出電壓為10V,轉換數字為3FFFH,對應為16383kg的重量。則每kg表示的電壓為;
7^2=10V/16383kg=0.61mV/kg
由此可以算出放大倍數:
X=Kj術=0.61mV/0.0012mV=508
即放大器應放大的倍數為508倍。前置放大器隻放大了約100倍,剩下的約5倍的放大倍數則由濾波器來完成。
1.3.2濾波器
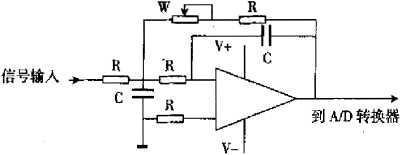
圖6低通濾波器
Fig6Thelowpass
車輛在台麵上行使時會對台麵產生振動,使傳感器輸出的直流信號又疊加了一個交流分量,影響稱重精度。由於車輛在台麵上的行使速度較低(一般小於15km4i),故疊加的振動信號屬於低頻信號。在電路上要抑製這種低頻信號,一般采用低通有源濾波器。圖6是二階低通濾波器的電路形式,這種濾波器能獲得較好的濾波效果,而且兼有信號放大作用,放大倍數約為5倍。
1.3.3A/D轉換
永平銅礦軌道衡A/D轉換釆用進口的高精度的14位轉換器ADC1130,其轉換時間為52us,最大輸入電壓為10V。專門設有一個電路振蕩器,輸出50Hz的窄脈衝來控製ADC1130的轉換,即A/D每10ms轉換一次。A/D轉換完成後,輸出一個轉換完畢信號,貯存在緩衝器的最高位(與數值信號疊加在一起)。A/D轉換後的數字信號通過光電耦合器傳輸到計算機進行數據處理。每次傳輸的數據共有16位,前14位是數據位,第14位為空位,第15位為轉換完畢信號。
通常在軌道衡檢定時,隻需稍微調整濾波器電路部分的可調電位器W,使放大電路滿足稱重的準確度。這是因為傳感器的供橋電源以及電路參數隨時間變化會有漂移,因此二次儀表的放大倍數需要適當調整,以保證稱重的準確度°
1.4計算機的數據處理
計算機程序係統主要由數據采集一分析程序、過磅數據處理程序、打印程序等組成。二次儀表與計算機的通信需要一塊接口板來完成。計算機的數據采集一分析程序通過接口板釆集稱重數據,依次取稱重信號的高8位和低8位,然後合並成一個完整的16位數據。
數據釆集一分析程序需要完成稱重數據的采集、自動調零、台麵來車判別、車輛車型判別、過磅數據顯示和貯存等功能。台麵零點是以256次的采集數據進行平均,再乘以4(力作用在四個傳感器上)得到的。這種平均算法可以起到數字濾波作用,算出的台麵零點很穩定。在台麵來車過磅後,要去掉台麵零點的數值,才是車輛稱重的數值。
程序中,車輛車型判斷和數值計算方法最為重要。車型判斷原理:根據車輛兩個輪對和一個輪對對台麵壓力的不同,計算機所取的稱重數據是有差異的,程序依此判斷台麵是否來車"由於信號取樣時間T(10ms)是固定的冶麵鋼軌的長度1也是固定的,可以計算出車輛過磅速度S:
S=L/(TxK)
K為轉向架通過台麵時稱重數據的釆集次數。
有了過磅速度,根據數據釆集次數,可以反算出車輛前後兩個轉向架的長度,程序依此能獲知車輛的車型(標準車輛與非標準車輛)。
對於標準四軸車的稱重,單台麵、以轉向架為計量方式的動態電子軌道衡采用兩頭稱重再求和的方法。即先計量前轉向架的重量,再計量後轉向架的重量(一個轉向架有兩個輪對)。車輛輪對進出台麵時,傳感器的輸出信號有一個突變階段,隻有中間階段的平穩信號才能正確反映車輛的重量,而兩端的信號則給予剔除。將前後兩個轉向架的重量求和,即為一節車輛的稱重數值。程序還可以讀取稱重修正文件中的數據,用以修正稱重數值。
2結語
通過以上分析,可以了解動態電子軌道衡的稱重原理,知道影響稱重精度的環節主要在機械台麵、傳感器、二次儀表上。在對動態電子軌道衝進行檢修或精度調整時,主要從這三方麵入手。由此及一般,可知電子稱重設備的一般稱重原理和維護方法。當岀現稱重精度不夠時,應從機械台麵是否水平、靈活,傳感器有無損壞,二次儀表信號處理是否正確這三方麵逐一尋找原因。永平銅礦對軌道衡進行調整時,就是參照這些方法進行的,軌道衡也多次在國家檢定中獲得0.2級的最高檢定精度。
文章來源於網絡轉載,侵刪
- 上一篇:電子稱重儀表及傳感器附屬電路 維修經驗淺析
- 下一篇:混凝土配料秤的檢定方法
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器