谘詢電話
ENGLISH0755-88840386單片智能化稱重儀表的設計
發布時間:2020-10-20 10:55:40 |來源:網絡轉載
一、引言
電子衡器有許多明顯的優點,如顯示讀數快、清晰、抗幹擾性好、精確、不易產生計數誤差等等。微機控製的電子衡器,更擴充了秤的功能,如去皮重、打印、累計、計數、搖測等。專用稱重儀表,可以設計一個計算機係統的終端,因而在現代化生產和管理中,電子衡器是不可缺少的計量手段。現在國內電子衡器發展迅速,在分析一些電子衡器基礎上,用上一些如OP07、ICL7135、A/D轉換器和8039單片機等,開發出一台通用稱重儀表,並用於100kg台秤和改造一台30t的汽車衡。儀表按照III級秤標準,功能有去皮、累計和打印等。
二、係統工作原理與組成
儀表原理框圖如圖1所示。
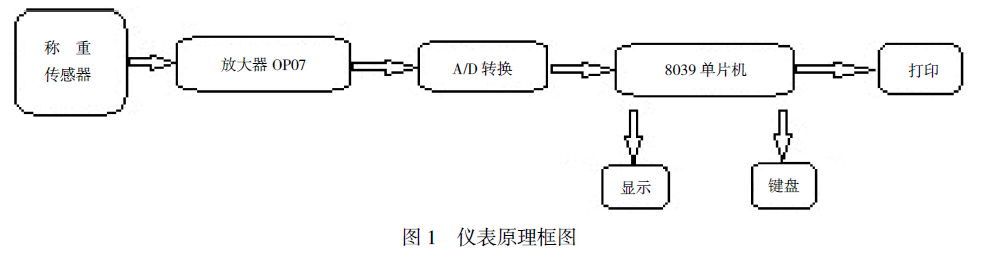
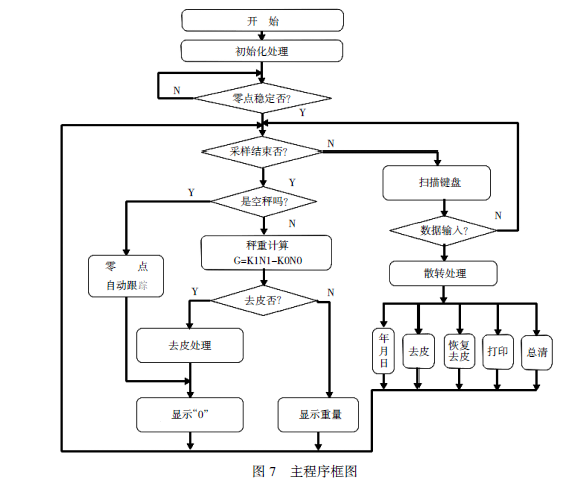
電阻應變式穩重傳感器把重量轉換相應的電壓信號,經高性能測量放大器放大後,由A/D轉換器ICL7135轉換成BCD碼。每次A/D轉換結束,產生中斷請求信號,8039單片機在中斷服務程序中輸入數據。在主程序中,根據輸入數據的大小,判斷是空秤(零點)還是稱重。開機後,當程序檢測到零點已穩定後,顯示器顯示全零符號,並可以稱重。稱重的計算公式為:
G=K1N1-K0N0
式中:N1—有稱重物時,微機輸入的BCD數;
N0—零點的BCD數;
K0、K1—當量值,表示每一個BCD
數代表的重量值。
由於稱重傳感器受力與輸出電壓呈非線性關係,K0與K1在不同受力條件下,其值不同。使用時,我們用的標準砝碼實測傳感器的輸出特性,用折線代替曲線,每5kg為一個校正點(限於量程為100kg台秤)把測得的一組K值以數據表格形式,固化在EPROM中,以供程序作非線性處理時自動查找。微機把重量計算結果,送顯示器顯示,同時可以鍵入打印命令,打印稱量結果。如果稱量值G小於0.5d,則顯示器仍顯示零,並把此值視作零點值處理。儀表采用零點自動跟蹤的方法,以克服硬件引起的零點漂移。係統原理圖如圖2所示。
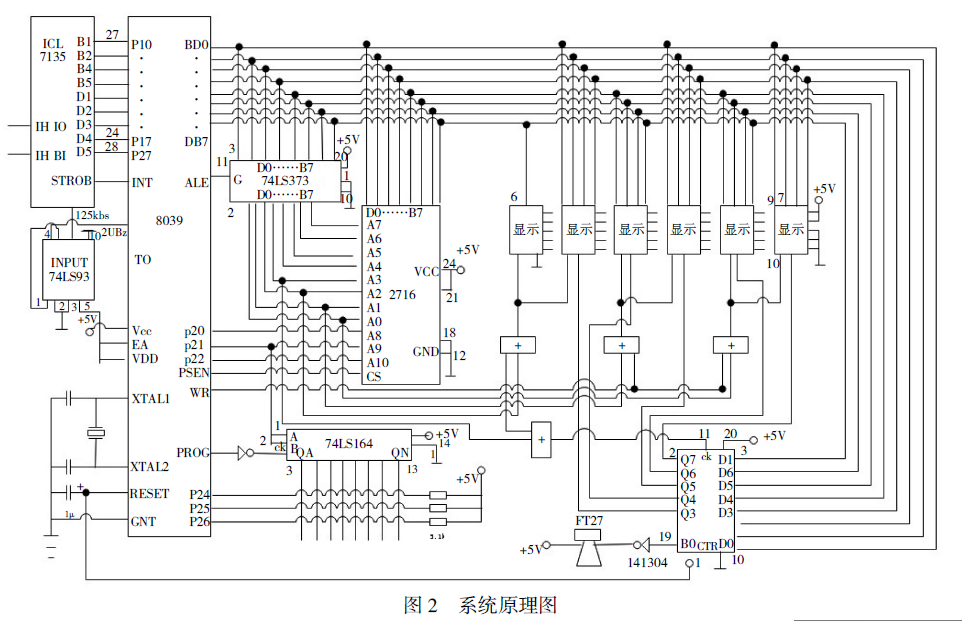
稱重儀表微機係統由8039單片機、程序存貯器、模數轉換器、測量放大器、顯示器、鍵盤、打印接口電路組成。
顯示部分包括±號共6位,四位顯示重量值,累計顯示可用五位。顯示器用CL002BCD碼顯示器。內部有鎖存功能,用外部存貯器訪問指令MOVX@Ro,A完成送數。一片8D鎖存器74LS273用來控製應顯示的位。T1腳輸出2MHz時鍾,經74LS938分頻後,用作ICL7135A/D轉換器的時鍾。
三、模擬部分設計
模擬部分是保證電子衡器精度指標的重要部分,因此必須精心設計和裝配,才能達到預定的精度指標,並應盡可能使結構簡單可靠,成本降低。
(一)儀表誤差估算和分配
為使電子衡有0.05%的精度,必須對各部件的誤差作出估算和合理分配,以此作為各部件的設計和選購的依據。由儀表原理框圖可見,儀表測量誤差主要來自於稱重傳感器、測量放大器和A/D轉換器等三個方麵。
(1)稱重傳感器
傳感器是外購整件。稱重傳感器是綜合精度,表現在非線性、滯後、重複性和溫度補償等。由於使用微機作數據處理,非線性可以校正到所需精度範圍之內,溫度影響也可得到一定補償。數據滯後尚未找到合適的解決方法。經微機處理後,稱重傳感器綜合精度可達到0.05%~0.03%。係統選用0.04%精度。
(2)A/D轉換器
稱重傳感器引起的誤差ε1是係統誤差的主要部分。假設A/D轉換器引起的誤差為ε2,測量放大器引起的誤差為ε3,則綜合誤差為:
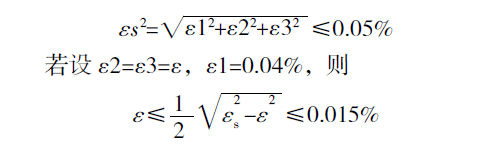
故選用ICL7135。這是雙積分型精密1/2位A/D轉換集成電路,抗共模幹擾能力強,轉換數字範圍為-19999~+20000,分辨率為1/40000,精度不低於0.015%,滿足要求。
(3)測量放大器
測量放大器精度主要是增益精度和輸出漂移,它們都會使讀數直接產生誤差。增益精度比較容易保證。根據運算放大器理論,如果開環增益足夠高,反饋放大器的增益將由反饋電阻和輸入電阻決定。如開環增益大於106,電阻選用精度為0.05%精密電阻,增益精度達0.01%並不困難。輸出漂移的控製,一方麵要選用低漂移運放,其次要設計放大電路,盡可能抑製漂移。但微機控製的稱重儀表,有獨特的工作方式,由於稱重操作的間斷性,儀表隻要求在稱量期間保證漂移量不超過的允差即可,被稱物在秤的台麵上最長時間不應超過20min。在空秤期間,微機自動跟蹤零點,零點在機內是浮動的,漂移量被淹沒,而不會被積累,這就降低係統對硬件漂移的要求。
(二)低漂移測量放大器的設計
根據上述分析,可定出測量放大器的技術指標(限於量程為100kg台秤):
(a)增益K=91
(b)增益誤差≤0.01%
(c)折合到輸入端的溫漂≤0.8μV/℃
(d)最大輸出電壓2V
(e)共模抑製比≥20db
增益的確定是根據A/D轉換器滿量程輸入電壓2000mV與傳感器滿量程輸出22mV之比求得。而漂移量的確定,則是根據秤的靈敏度而定。否則將會使開機預熱時間過長,以及承重20min保持讀數準確難以達到。
(1)放大電路的選擇
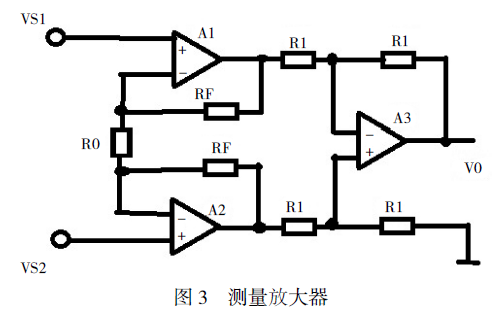
根據技術指標,測量放大器必須為低漂移、低噪聲、高增益精度和高抗幹擾能力,符合要求的橋路放大器,目前流行的測量放大器如圖3所示。其中,A1、A2、A3為低漂移運放。第一級是由A1和A2組成雙端輸入、雙端輸出差動放大電路。由於都接成同相端輸入信號,因而有較高的輸入阻抗。電路的對稱結構,使A1、A2輸出端的共模電壓和漂移電壓對稱,並在第二級A3所組成的差動放大電路得以抵消,故該電路有較高的共模抑製能力和較低的漂移。第一級放大電路嚴格對稱,可把R0的中點視作接地點,根據運算放大器工作原理,可推算出該級差動輸入信號的增益為(1+2RF/R0),改變R0的值,即可以改變該級的增益,而不影響電路的對稱性和對共模信號的抑製能力,這是該種放大器的優點。第二級放大器的增益通常設計為1,並且四隻R1要求嚴格匹配,這樣可使該電路有較高的共模抑製能力和低漂移。
(2)測量放大器的參數計算
1)運算放大器的選擇
測量放大器要求A1、A2、A3都為低漂移、低噪聲運放,才能滿足整個電路的技術指標,故選用5GOP07D,主要性能參數:輸入失調電壓Vos為60μV;輸入失調電流ioses為0.8nA;溫度漂移TCVos為0.7μV/℃;共模抑製比CMRR為126db。以上參數指標,可以滿足設計要求。
2)確定RF、R0的值
根據測量放大器增益公式,寫出:
1+2RF/R0=91
RF=45R0
為使放大器兩個輸入端偏置電流盡量平衡,應使輸入回路中的電阻與R0//2RF相等。橋路電阻約為350Ω。考慮到OP07偏置電流IB僅為±2nA,以及不同量程的電子衡,需改變R0的值調節增益,故選RF=20kΩ,R0=440Ω。二隻RF必須嚴格匹配,精度選用0.05%,並經精密電橋測試,挑選配對使用。R0選用0.1%的精度。為抑製串態幹擾,放大器的輸入、輸出端需接濾波電容,電容也要選用高精度、高穩定性元件。
3)為抑製共態幹擾和簡化結構采取的措施
本儀表測量電橋用±5V供電,使放大器的輸入端工作占電位接近零電位,因而由電源引入的共模信號大大減少,測量電橋供電電源隻需用普通三端穩壓器供電即可,而不需要用高精度的電橋電源。設計的另一個特點:省去了一隻價格高低漂移運放A2,把A1、A2差動輸出通過二隻R1電阻直接耦合到ICL7135輸入端。這是因為ICL7135允許差動輸入,並有較好的對稱性。經以上設計,整個模擬電路如圖4所示。經測試,在ICL7135輸出端接數碼管顯示,放大器輸入端接傳感器,在環境溫度較高的情況下,開機後連續工作四小時,漂移不超過七個最低位字。
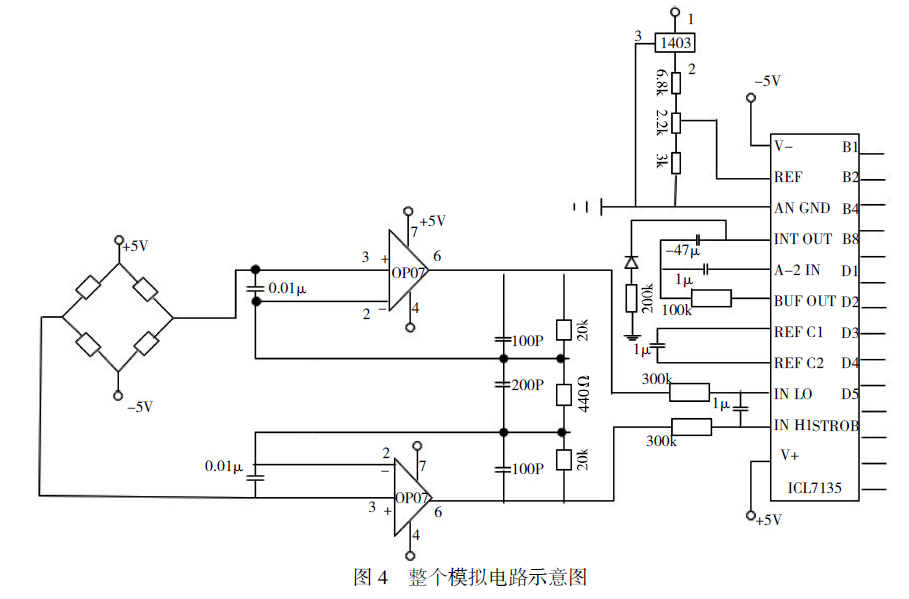
圖4整個模擬電路示意圖
四、ICL7135與8039的連接
ICL7135輸出方式為動態掃描的BCD碼,輸出時序如圖5所示。當時鍾頻率選用100KHz,轉換時間約為400ms。這對於轉換精度要求高,而轉換速度允許低的電子衡器是較適用的。
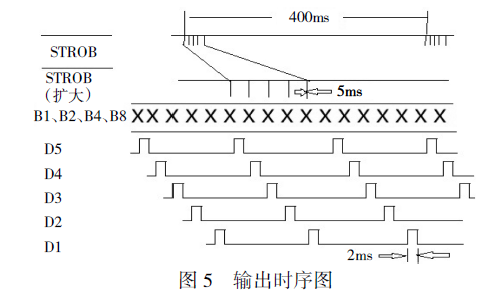
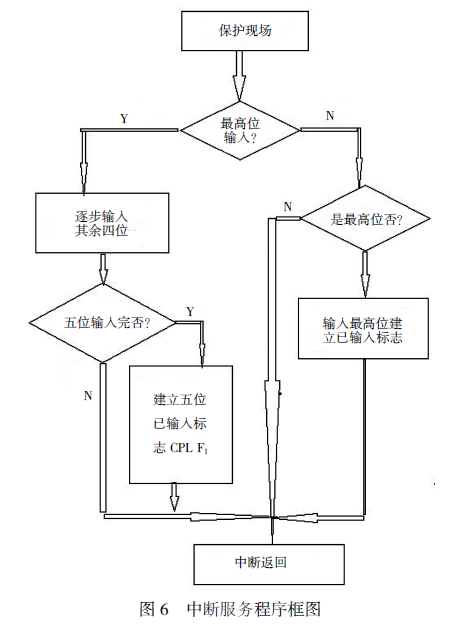
每當一次轉換結束,STROB即連續產生五個脈衝,脈衝寬5μs,間隔2ms,它分別使五個位信號D5、D4、D3、D2、D1依次有效。每個位信號有效時,同時在B8、B4、B2、B1四根數據線上出現該位BCD碼。D5對應的是最高位BCD碼,它是在第一個STROB下跳時出現。經2ms的間隔,STROB第二次下跳,使D4有效,同時在四根數據線上出現次高位BCD碼。經10ms時間,五位BCD碼全部在數據線上出現過一次。在400ms後下一組STROB到來時,重複上述過程,它表示一次新的轉換結束。根據ICL7135輸出時序,設計出與8039的連接電路。8039的P1和P27共九條線,輸入四位數據和五個位號,STROB作為8039的中斷請求信號。在中斷服務程序中輸入數據,每中斷一次可接收一位BCD碼。用判斷那一位位信號有效的方法,可以確定本次輸入的那一位BCD碼。為保證輸入一個完整的五位BCD碼,在最高位BCD碼輸入後建立一個標誌。當該位未輸入時,其餘四位也不予輸入。五位BCD碼全輸入後再建立一個標誌,用來告訴主程序,一次數據采樣已結束。中斷服務程序框圖如圖6所示。
五、係統應用軟件
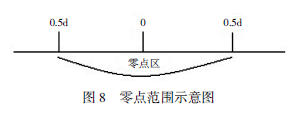
係統應用軟件由主程序、子程序和中斷服務主程序第一段程序的任務是開機後等待係統硬件工作點穩定,同時檢查係統硬件工作是否正常。當硬件工作點穩定時,計算機每次讀入的采樣值的誤差,在精度允許的誤差範圍內。因此,可用比較程序,完成這一判斷。工作點穩定後,機內零點值也被確定,於是程序進入稱量程序段。計算機按上述稱量計算公式完成稱量。但在稱量計算前,需先判斷當前輸入的采樣值是零點(空秤)值還是稱重值。如是零點值,則由零點自動跟蹤程序處理。零點是稱量的基準,需認真對待。由於硬件的溫漂和各種幹擾使零點產生偏移,零點自動跟蹤的方法是:不斷用新的零點值去代替上一次的零點值。電路的噪聲和幹擾使每次讀得的零點值是不同的,絕對零點值是不存在的。因此,有必要建立一個零點區,凡讀得的值進入零點區,都視作零點值。取十個這樣的零點值的平均數,作稱理基準,並不斷被用同樣方法所取得的新的平均數所取代。零點區範圍應小於±0.5d,因重量值等於±0.5d時,經四舍五入應顯示±1個d的值。但零點區也不能取太小,太小了很容易脫離零點自動跟蹤範圍,使秤不能回零,如圖8所示。
六、結束語
儀表采用單片微型計算機技術,它具有很高的功能價格比指標;體積小、I/O功能強、使用靈活、抗幹擾性能好、價格低廉是它的突出優點,這對於數據處理量不大的稱重儀表是非常實用的。
稱重傳感器橋路用±5V供電,使測量放大器的輸入端接近零電位,因而大大削弱共模信號,它的直接利益是可以簡化橋路電源。在保證精度的前提下,測量放大器中還省去所有這一切的努力,都是為了進一步簡化係統的結構,降低儀表的成本,為普及電子衡的應用帶來技術和經濟效益。
文章來源於網絡轉載,侵刪
- 上一篇:稱重儀表通訊故障的診斷與排除
- 下一篇:控製型稱重儀表選型參考
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器