谘詢電話
ENGLISH0755-88840386裝載機動態稱重儀表的設計與實現
發布時間:2020-10-27 15:06:34 |來源:網絡轉載
1前言
為防止裝裁機對列車、貨車等開展裝卸搬運時出現超重等狀況,必須把握貨品的淨重。而裝裁機自始至終處在流水線作業情況,無法用固定不動的電子衡器對它開展秤重因此 選用動態性稱重設備,對裝車貨品的淨重開展動態性精確測量,進而能清晰地顯示信息出所裝車的原材料淨重,不必停鬥,升舉全過程中自動稱重,節約工作時間,提升 生產率。傳統式的方式是當動臂升高至2個帶磁接近開關所固定不動的區段時,對係統液壓油缸的工作壓力值開展取樣⑶,秤重結果會出現很大誤差。中國動態性秤重商品的精密度大多數在3%〜10%。
在當今精確測量行業,動態性精確測量受離散係統、慣性衝擊性和任意影響等要素的危害,科學研究尚處在初始階段,裝裁機的動態性秤重的科學研究尚較為落後。裝裁機自身的工作中構造承受力相對性繁雜,且其辦公環境繁雜極端,造成 無法創建精確的動力學方程。近些年,層出不窮各種各樣新的科研成果。EMD和基因遺傳神經元網絡等優化算法被導入裝裁機動態性秤重中,提升 了測量精度。品質檢測係統的動力學方程運用到工程項目具體中還是存有眾多難題,必須對其進一步健全才可以多方麵運用。
2裝載機工作中設備動力學方程改善
裝載機的工作中設備由動臂、挖鬥、拐臂和支撐杆等構成。與上下動臂相接的舉臂液壓缸用於進行升降機臂工作,與拐臂相接的翻鬥液壓缸用於進行翻鬥工作現階段運用更為廣泛的秤重計劃方案為依據裝裁機非行車情況下工作中構造的動力學方程測算負荷。但事實上,裝裁機開展裝卸搬運工作時,不太可能維持靜止不動或均速行車情況,處在變加快的行車全過程中。因為車子行車造成的瞬時速度,對工作中設備存有慣性作用,若不多方麵考慮到,一定會危害測量精度,故文中創建裝裁機工作中設備動力學方程時添加了車子行車瞬時速度。裝裁機工作中設備的幾何圖形平麵圖及應力分析如圖所示1所顯示。
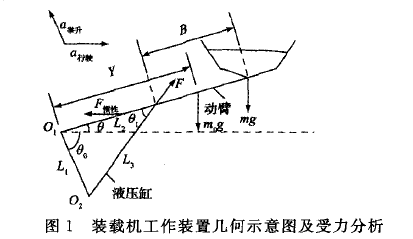
動臂升舉時,挖鬥和原材料除開隨動臂開展牽連運動外,仍在翻鬥設備的功效下相對性於動臂掉轉了一定視角,維持豎直情況,因此 能夠將挖鬥和原材料的作用力功效視作對動臂的恒外力作用。取裝裁機為參考係,假定裝裁機這一非慣性係以瞬時速度相對性於路麵健身運動,那麼動臂、挖鬥和原材料將遭受與該加速度方向反過來的慣性力矩功效。動臂升舉全過程中,翻鬥液壓缸處在閉鎖情況,促使挖鬥持續保持豎直方位,因此挖鬥和原材料的慣性力矩功效於翻鬥組織,並不功效於動臂,因此 隻考慮到動臂遭受的慣性力矩。
3動態性稱重設備硬件開發
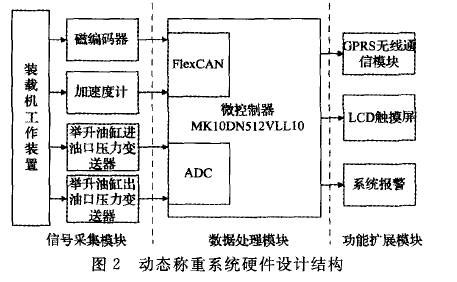
動態性稱重設備的硬件開發框架圖如圖2所顯示,關鍵分成數據信號收集控製模塊、數據處理方法控製模塊和作用拓展控製模塊。
3.1數據處理方法控製模塊
數據處理方法一部分的關鍵選用Freescale企業的MK10DN512VLL10微控製器,核心為32位係統ARMCotex-M4。ARMCotex-M4具備較高能的信號分析作用與Cotex-MCPU係列產品的功耗、降低成本和便於應用的優勢的組成此MCU內嵌512KBFALSH程序存儲器,具備迅速、高精密的16位多次靠近型模數轉換器(SARADC),FlexCAN控製模塊適用全部的CAN2.0係統總線協議書。
3.2數據信號釆集控製模塊
升舉液壓缸汽壓的精確測量釆用博航企業的BPM-T322B裝裁機專用型的溫度變送器,具備高精度、抗震動、經常衝擊性等優勢,將工作壓力數據信號變換為1〜9V的工作電壓數據信號輸出,稱重儀表能夠立即收集工作電壓數據信號,不用變大,抗幹擾能力好,溫度飄移小。安裝時在裝裁機一側的動臂升舉液壓缸的液壓機回道上的進油口和出油口各安裝一個,差分信號便可獲得工作壓力數據信號。
采用轉動磁伺服電機精確測量動臂的仰俯視角,磁編號設計方案選用無接觸式的磁伺服電機處理芯片AS5145,可以在全部360。範疇內完成高像素的轉動部位編號,出示12位屏幕分辨率的瞬時速度部位標示安裝時根據機械設備傳動係統,使磁伺服電機與動臂同軸轉動,根據CAN插口每過十米s傳出一幀數據,即時輸出動臂的視角位置信息。
采用三軸加速度傳感器,輸出三軸方位瞬時速度值,安裝在動臂上。安裝時確保動臂水準時加速度傳感器的X、Y軸也維持水準即瞬時速度為。且X軸與動臂平行麵。Z軸方位的瞬時速度精確測量值即標示垂直平分動臂方位的瞬時速度值,為重力加速、車子行車瞬時速度和動臂舉升瞬時速度的合瞬時速度,也由CAN插口每過十米s輸出一幀數據。
3.3作用拓展控製模塊
作用拓展控製模塊關鍵包含數據信息顯示信息與人機交互技術、GPRS無線通訊及係統軟件警報。數據信息顯示信息與人機交互技術控製模塊采用3.2寸的電阻器式觸摸顯示屏INANBO-T32-ILI9320-V12,led背光的亮暗調整采用背光源驅動器元器件LP8556進行,led背光高亮度平穩,便於晚間工作。其較大 特性是不用依靠電腦鍵盤、電腦鼠標等額外鍵入專用工具,立即完成人機對戰互動交流針對LCD的觸摸屏部位座標的明確,依據電阻式觸摸屏的基本原理由MCU的觸碰感測器鍵入(TSI)腳位和ADC腳位及其一些簡易的外圍電路進行。
對於傳送間距、係統軟件成本費與維護保養等一係列難題,根據GPRS傳送控製模塊,明確提出無線數據傳輸的方案網。GPRS無線通訊選用SIMCOM企業的SIM900A處理芯片進行。其輸出功率為GSM/GPRS900/1800MHz,SIM900A有短信和GPRS2種通信方式,其在GPRSwifi網絡聯接標準下,可置入TCP/UDP協議書、FTP/HTTP等協議書的數據通訊3。MCU中間根據申口聯接,釆用AT命令進行對該控製模塊的操縱。
報警模塊由GPIO口根據光耦電路驅動器無源蜂鳴器傳出噪音,提示司機係統錯誤或者原材料超載。
4動態性稱重設備軟件開發
係統軟件軟件流程圖如圖所示3所顯示。係統軟件啟動通電後開展自查,關鍵檢査與三個感應器的數據通訊是不是一切正常,若有常見故障傳出報警。裝載機司機根據觸摸顯示屏錄入汽車信息及工作信息內容,而且根據觸摸顯示屏進行係統設置,包含零點配備及合理秤重區段配備。在開展動態性秤重前需選中合理秤重區段,即動臂往上升舉全過程中,隻釆用某一視角區段內的數據信號做為合理的鍵入值,小於或高過這一視角區段均為失效數據信息。這類作法能夠防止插進工作狀況、鏟裝工作狀況、卸載掉工作狀況、動臂降低工作狀況,隻留考慮動態性秤重標準的舉升工作狀況開展數據信號收集。若不設定,選用默認設置區段開展秤重。
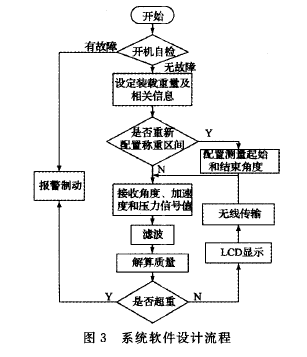
微處理器從FlexCAN控製模塊和A/D變換控製模塊獲得感應器數據信號值。數據信號釆集中會遭受噪音影響,係統軟件釆用數字濾波,不但對抑止噪音、清除影響可以具有輔助功效,並且對提升 儀表盤的測量精度、減少數據誤差具備關鍵功效口對。釆用遞推均值過濾法對感應器釆集的數據信號開展過濾解決。這種方式對規律性影響有優良的抑製效果,並且光滑度較高口旳。依據已經知道的動力學方程和主要參數,解算出鏟鬥內的荷載淨重,並即時在LCD屏上顯示信息單鬥淨重、總計裝載貨量及其汽車信息,並當裝車品質超限額時傳出報警數據信號,並依據必須將這種信息內容根據無線數據傳輸給監測中心。
無線模塊接受監測中心根據互聯網發過來的命令,另外也向監測中心推送裝裁機工作情況及秤重數據信息。傳送間距不受到限製,便於監測中心另外管理方法幾台裝裁機,提升了管理效益。
5試驗剖析及誤差補償
稱重儀表設計方案進行後,將感應器及儀表盤安裝在volvoL90E裝裁機上,其額定載重量為5t,在裝車當場開展很多試驗,對稱重儀表的作用開展認證而且開展品質校準試驗。因為裝裁機動態性稱重設備的誤差來源於繁雜,本係統軟件必須提早校準,將一係列影響誤差記下來,隨後在應用全過程中依據必須載入記下來的誤差開展真正值的賠償,故必須將這種影響誤差數據信息儲存在斷電不遺失的磁電儲存器中。
選擇的裝車目標為沙子,每一次試驗稱重的沙子品質從小到大,從100kg到5t,每一組品質相距100kg上下。將沙子由測量範圍為1公斤的地磅稱量獲得規範品質,再將該重量的沙子由裝載機舉升,根據動態性稱重設備精確測量出品質。試驗獲得的規範品質和動態性稱重設備精確測量出的品質一一對應,按尺寸順序存儲在磁電儲存器中,將之上儲存的數據信息稱之為校準表用以誤差賠償。
品質校準進行後,動態性稱重設備依據實體模型解算出品質後,實行查詢表程序流程,最先明確出該品質處在磁電中儲存的校準表的哪2個精確測量值中間及其與他們相匹配的規範品質,隨後運用最小二乘線性擬合,進而獲得誤差賠償後品質。
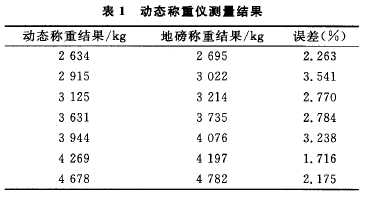
表1為動態性稱重儀對原材料淨重的精確測量結果,單鬥誤差操縱在±3%上下。
6結果
研製開發的動態性稱重儀表經試驗認證,完成了動態性稱重作用,並得到 優良的測量精度。認證了該控製係統設計的合理化,可運用於生產製造具體中。完成了工業觸摸屏的設計方案,促使該儀表盤能夠鍵入工作及車子等信息內容,並依據具體情況進行配備。儀表盤拓展了GPRS無線通訊作用,便捷對幾台裝載機的管理方法與生產調度。該儀表盤精巧、實際操作便捷,具備優良的可靠性和擴展性,具備寬闊的應用前景。
文章來源於網絡轉載,侵刪
- 上一篇:直流電子稱重儀表輻射抗擾度測試
- 下一篇:智能儀器的定義和發展
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器