谘詢電話
ENGLISH0755-88840386回轉式給袋包裝機自動供袋機構設計
發布時間:2021-03-24 13:33:48 |來源:網絡轉載
0引言
隨著國民經濟的快速發展和人們需求的多樣化,對產品的包裝要求越來越高,迫切要求包裝實現機械化和自動化。經過三十多年的快速發展,我國包裝技術及裝備的水平已有很大提升,部分產品處於國際領先地位,但由於起步較晚,相比於美、日、德等發達國家的先進水平,我國產品的技術水平、智能化、成套性、創新性產品等還存在較大的差距[1-2],開展現代包裝關鍵技術及裝備智能化的研究及產業化具有十分重要的意義。
回轉式給袋包裝機適用於預製包裝袋的顆粒、粉末、塊體、液料等的包裝,包裝袋圖案完美,封口品質好[3-4]。供袋機構是給袋包裝機的重要組成,多采用凸輪連杆複合機構實現夾持器等執行機構的動作,機構性能直接影響包裝速度與包裝精度。研究人員采用不同的方法研發高性能執行機構[5-7],晏祖根等運用工作循環圖等設計了穿箭式捆紮機頭,王興東綜合考慮尺寸公差和配合等因素優化平麵連杆機構,張英建立了平麵並聯機構正運動學模型。基於包裝機及供袋機構工作原理的分析,設計了自動供袋工藝,建立了機構分析的數學模型,確定了機構尺寸及位置關係。
1回轉式給袋包裝機工作原理
回轉式給袋包裝機可自動完成預製包裝袋上袋、物料計量充填、包裝袋封口和成品整形輸出等包裝工序。綜合包裝物性、包裝速度、封合方式以及製造成本等因素,包裝機可設計成6工位、8工位、10工位等不同形式。圖1包裝機為8工位回轉式給袋包裝機,主要由供袋、充填、封口、成品整形輸出等部件以及間歇回轉運袋係統、電控係統等組成。工序盤間歇回轉,驅使鉗手夾持供袋機構輸送的預製包裝袋,順序間歇地通過供袋、打碼、開袋、充填、清口、封合、輸出等工位,完成物料的自動包裝。
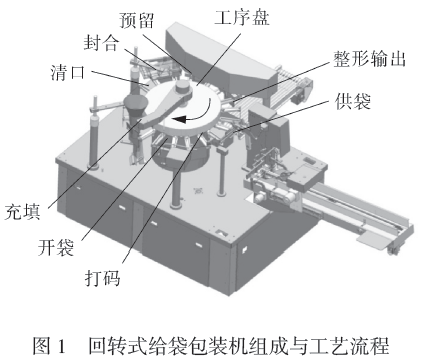
按物料及包裝要求的不同,如花生、瓜子等顆粒狀物料,豆瓣醬等醬狀物料,榨菜等條狀物料等,充填裝置可采用不同類型的攪拌、輸送、計量、充填機構。已充填物料的包裝袋,應對包裝袋進行整形,並對封口部位進行除塵、清口等處理,以保證封合質量。按包裝要求不同,可對包裝袋進行二次封口,並完成氣調、真空等包裝操作。
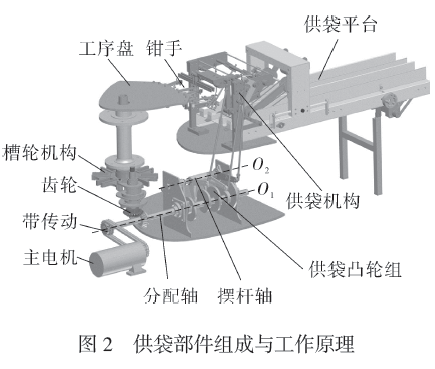
包裝機主電機通過鏈傳動、槽輪機構驅動工序盤做間歇轉動,通過凸輪機構、連杆機構將主運動傳遞到各個執行部件,如圖2所示,結合氣動控製係統,實現末端執行機構的工藝動作。機器設置多處檢測裝置,如出現故障,檢測裝置將故障信號反饋至控製係統,控製係統做出相應的故障提示並停機,以避免安全事故和物料浪費。包裝速度由物料特性、包裝重量及包裝精度等確定,可根據包裝要求和生產需要自動調節包裝速度。
2供袋部件自動供袋工藝
供袋部件是回轉式給袋包裝機的重要組成,其組成與工作原理如圖2所示,主要由驅動電機、分配軸、一次上袋機構、二次上袋機構、夾取提升機構、掃袋皮帶、送袋皮帶、供袋平台和基座等組成。供袋部件的機構分析簡化模型如圖3所示,為清晰表達,各驅動凸輪及相應擺杆機構分開繪製,其軸心分別對應分配軸軸心O1和擺杆軸軸心O2。
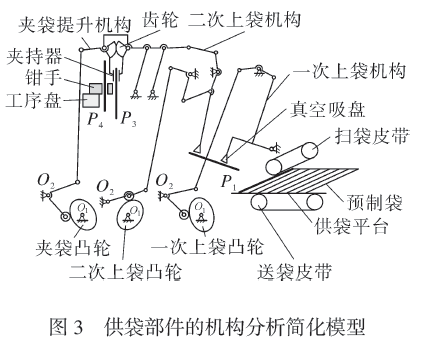
(1)人工將預製包裝袋放到供袋平台上;(2)送袋皮帶采用多根橡膠圓帶,安裝在供袋平台的底部;橡膠圓帶壓緊包裝袋,在電機驅動作用下,將包裝袋摩擦輸送至掃袋工位;;(3)掃袋皮帶采用多根橡膠圓帶,斜向安裝在供袋平台的上端;驅動電機按控製係統指令間歇旋轉,將單張包裝袋依次摩擦輸送至一次上袋工位P1;(4)電機連續旋轉,通過分配軸上的一次上袋凸輪,驅動安裝在一次上袋機構末端的真空吸盤相應動作,真空吸盤在P1 工位處吸附單張包裝袋,移送到二次上袋工位P2;(5)分配軸上的二次上袋凸輪驅動二次上袋機構末端的真空吸盤動作,真空吸盤P2在工位處吸附包裝袋,移送到二次上袋工位P3;(6)分配軸上的夾袋凸輪驅動夾袋提升機構末端的齒輪旋轉,驅動夾持器相向動作,在P3工位夾持包裝袋;同時,與二次上袋機構的平行四邊形機構協同動作,夾持包裝袋平動移送到包裝機的上袋工位P4;(7)安裝在工序盤上的鉗手動作,在P4工位夾持包裝袋,完成包裝袋的自動供袋;工序盤旋轉,鉗手夾持包裝袋輸送至後續的開袋、充填、封口等包裝工位。
3供袋部件的機構選型與工作循環圖設計
多機構協同動作的複雜運動,可通過伺服電機、步進電機、氣動係統等,結合運動控製係統實現。這種方式結構尺寸較大、造價較高,當包裝速度、包裝尺寸發生變化時,要修改控製程序的相關參數,要求使用人員具有較高的技術水平,限製其在包裝機械領域的更廣泛應用。
凸輪機構可通過凸輪輪廓軌跡曲線的設計,實現複雜的從動件運動規律,從而實現多運動機構的運動協調;但機構製造與調整要求較高,磨損後會影響運動規律的準確性。連杆機構結構簡單、製造容易、承載能力大、可實現遠距離傳動,但無法實現從動件較長時間的精確停頓和任意軌跡運動。單一機構因其固有的局限性,無法滿足多方麵的要求,因此,自動機械多采用基於凸輪、連杆的複合機構,實現多執行機構的複雜運動。
供袋部件的供袋動作包括兩部分:一是供袋平台的掃袋皮帶和送袋皮帶的摩擦驅動,分別由各自電機驅動;二是分配軸上的凸輪組及連杆機構,驅動一次上袋機構、二次上袋機構、夾袋提升機構以及真空吸盤、夾持器進行協同動作,實現包裝袋自動供袋。
綜合集中驅動、結構尺寸、控製等多方麵因素,包裝機的供袋部件采用凸輪、連杆的複合機構,實現預製包裝袋的自動供袋動作,機構模型見圖3。
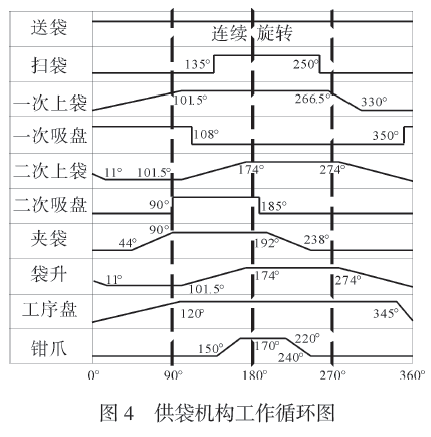
以包裝機的設計包裝速度50袋/min為例進行供袋機構設計,每個包裝袋的自動上袋時間為1.2s,即以分配軸O1為基準軸的供袋機構工作循環時間tk=1.2s。根據包裝機的生產能力要求,結合供袋機構的自動供袋工藝,綜合考慮各執行機構的運動協調、時間同步和空間不幹涉,以及機構運動規律誤差、運動副間隙、機構元件加工與裝配誤差、機構元件運動變形等因素,可分配各供袋動作所需時間與運動循環時間的占比關係,設計供袋機構的工作循環圖,如圖4所示。根據工作循環圖,利用相關的機構綜合、凸輪設計理論和仿真技術,可完成供袋機構的尺寸優化與結構設計。
4二次上袋機構建模與設計
4.1機構建模
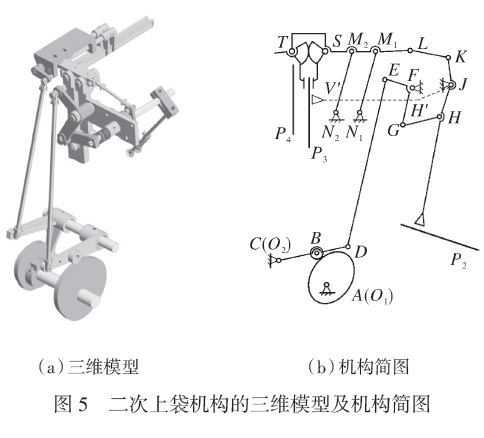
二次上袋機構是供袋部件的關鍵機構,真空吸盤V安裝在搖杆HJ末端,夾持器的驅動齒輪安裝在平動杆M1M2上,如圖5所示,其性能直接影響包裝機的包裝速度與包裝精度。
分配軸上的主動凸輪A連續回轉,驅動搖杆JHV擺動到JH'V'位置,真空吸盤V吸取包裝袋,從P2位置移動到P3位置;夾持器夾取包裝袋,將包裝袋從P3位置平移到P4位置;工序盤鉗手夾持包裝袋,間歇移送到下一個包裝工位。
4.2連杆機構設計
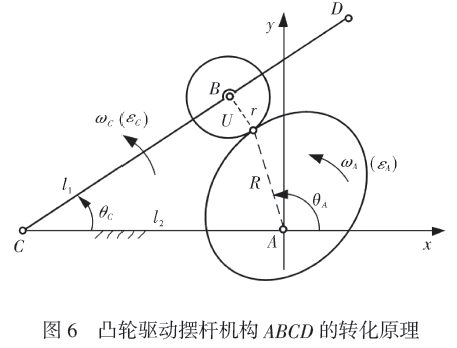
二次上袋機構由基於凸輪驅動的擺杆機構ABCD、雙搖杆機構CDEF、雙搖杆機構FGHJ和基於平行四邊形機構M1N1-M2N2的複合機構JKLM1M2四部分串聯組成。
對基於凸輪驅動的擺杆機構ABCD,可通過高副轉化低副的方式AUBC,將機構轉化為雙搖杆機構,如圖6所示,進而分析機構ABCD的性能。
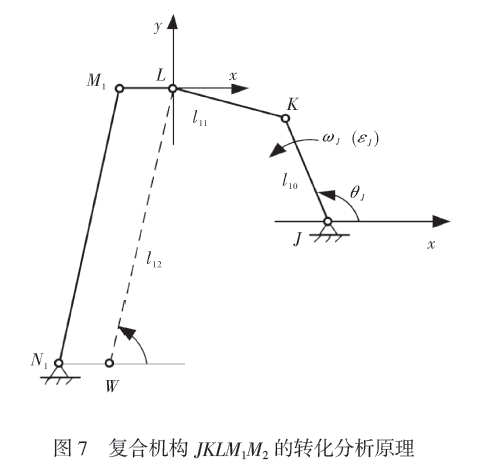
對基於平行四邊形機構M1N1-M2N2的複合機構JKLM1M2,可基於平行四邊形機構的特點,將機構簡化為雙搖杆機構JKLW,如圖7所示,研究杆件的輸入轉角θJ與鉸鏈點L的位置、速度的關係。
上述分析可知,二次上袋機構可轉化為四個串聯的雙搖杆機構。因此,二次上袋機構的特性研究與優化設計,可先優化設計各部分子機構,確定各子機構的連杆尺寸與位置;再綜合優化二次上袋機構,提高機構的綜合性能。
以雙搖杆機構FGHJ為例,采用矢量法建立的機構數學分析模型如圖8所示,各矢量杆形成封閉的矢量多邊形FGHJF,構件FG、GH、HJ、JF對應的杆長、方位角、矢量杆
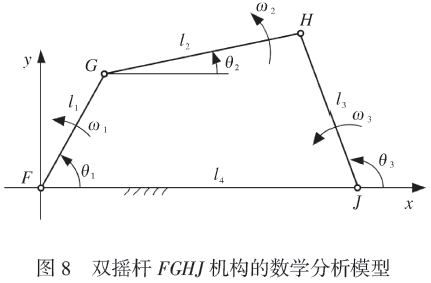
封閉矢量多邊形中,各矢量之和等於零,
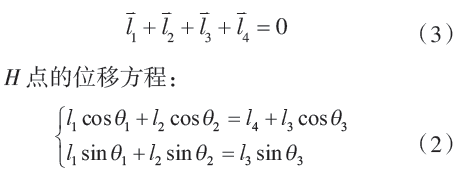
對上式進行推導、整理,可求得搖杆HJ的輸出轉角θ3、輸出轉速ω3與搖杆FG的輸入轉角θ1、輸入轉速ω1之間的數學關係:
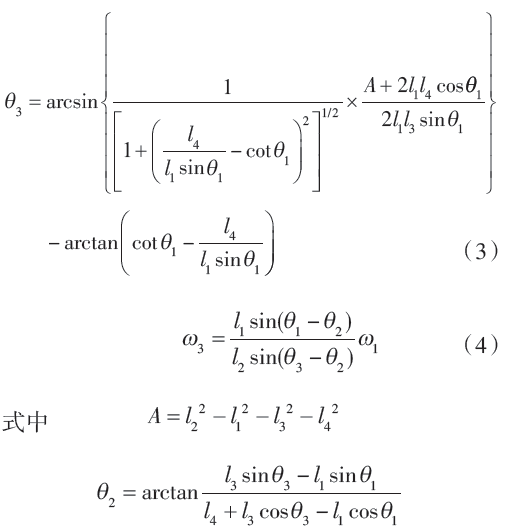
基於雙搖杆機構FGHJ的分析流程,可建立各子機構的運動學模型;基於各子機構的運動學模型,可綜合得到二次上袋機構的運動學模型,進而分析機構的運動規律、機構特性,優化上袋機構尺寸。
5結語
回轉式給袋包裝機總體布局設計需要,凸輪分配軸安裝在整機基座上,上袋機構安裝在供袋平台。采用供袋部件的機構分析與設計流程,綜合考慮機器的總體布局、包裝工位、機構尺寸與結構設計等多種因素,優化確定供袋機構的各連杆尺寸(mm):CB=125,BD=105,DE=645,EF=90,FG=130,GH=107,HJ=97,JK=25,KL=154,LM1=33,M1N1=200,其中連杆DE、連杆KL的兩端采用杆端軸承,杆長尺寸可根據實際需求進行微調。
作者:楊軍福,晏祖根,孫智慧,孟爽,耿誌國,劉卓群
深圳市k8凯发版官网儀器有限公司是一家專門從事稱重儀表和全自動包裝碼垛生產線的研發及生產的高新技術企業,所生產的JY500係列稱重顯示控製器(包括配料秤儀表、皮帶秤儀表、包裝秤儀表、重量變送器等)高速高精度,使用壽命長。k8凯发版官网儀器有十數年的現場校驗經驗,在業內有良好的口碑,且有專門的售後工程師幫忙解決產品使用過程中遇到的技術問題,客戶可以放心省心順心的使用我司的產品。如果對我司的產品感興趣,歡迎谘詢。
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器