谘詢電話
ENGLISH0755-88840386水泥包裝機自動套袋裝置設計
發布時間:2021-06-30 15:09:54 |來源:網絡轉載
回轉式水泥包裝機已成為水泥包裝的主流產品,具有高效、可靠、穩定性好等特點,但是普遍麵臨的問題在於操作過程中需要人工套袋才能完成水泥灌裝,不僅勞動強度大,而且在粉塵汙染環境下作業危險,容易造成生產事故,降低生產效率[1—5]。為此,以回轉式水泥包裝機為研究對象,開發與其配套的自動套袋裝置,以實現水泥包裝過程的全自動化。
1總體設計
回轉式水泥包裝機在操作過程中,除人工套袋外,其他如灌裝、計量、掉袋等均可自動完成。在包裝機四周均勻分布有多個出料噴嘴,研究的自動套袋裝置主要功能是將閥口袋穩定地套至出料噴嘴上,實現與回轉式水泥包裝機同步對接,以代替人工進行自動套袋。自動套袋裝置主要適用於尺寸為500mm×650mm的閥口袋包裝,設計套袋速度為1200袋/h,套袋成功率不低於99.9%,依據人工套袋工作流程,采用模塊化結構設計[6—7]。自動套袋裝置可實現供袋、取袋和套袋等功能,對應的3個模塊功能為:供袋機構,從供袋盤連續輸送閥口袋;取袋機構,吸取閥口袋並將袋口張開至可套入水泥包裝機出料噴嘴的尺寸;套袋機構,機械手爪抓取張開狀態的閥口袋,將閥口袋套入運動中的出料噴嘴,與包裝機對接完成灌裝流程。
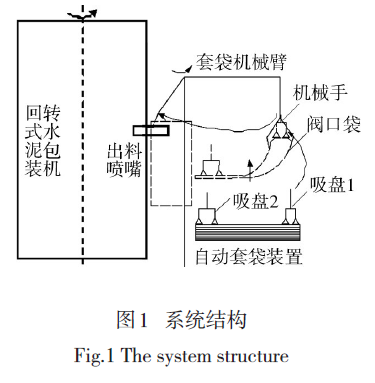
係統總體結構見圖1,左邊為回轉式水泥包裝機,右邊為與其配合的自動套袋裝置。在包裝機四周均勻分布多個出料噴嘴,繞包裝機中心軸回轉,當每個出料噴嘴旋轉至套袋工位時,自動套袋裝置迅速將閥口袋套至出料噴嘴上。閥口袋精準、平穩地張開動作非常關鍵,可借鑒不同包裝機張袋方式進行綜合設計[8—9]。圖1中自動套袋裝置的吸盤1和吸盤2同時從供袋盤上吸取閥口袋,吸盤2垂直運動,吸盤1做逆時針弧線提升,由於提升高度不一致,且單邊吸取,吸盤1沿弧線逆時針提升後,閥口袋袋口因兩側麵受力不均勻而自動張開,達到張袋目的。袋口張開後,機械手抓取閥口袋,套袋機械臂牽引與出料噴嘴對接。機械手抓取袋口已張開的閥口袋,套袋機械臂牽引完成套袋。
2供袋機構
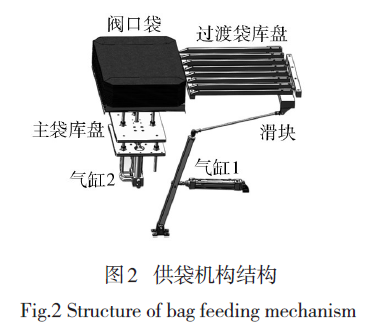
供袋機構連續不間斷地提供袋源,同時具有自動檢測無袋信息和閥口袋位置的功能。采用SolidWorks軟件設計的供袋機構三維結構見圖2,由主袋庫盤和過渡袋庫盤組成,交替工作。設備初始運行時,閥口袋被送至主袋庫盤,主袋庫盤將閥口袋運至套袋工位,開始進行自動套袋。計數器記錄套袋數量,當主袋庫盤上閥口袋的數量少於一定數量時,過渡袋庫盤接替主袋庫盤供袋,主袋庫盤回到初始位置,下一批閥口袋運送至主袋庫盤上,當過渡袋庫盤上的閥口袋全部套完後,主袋庫盤繼續進行供袋,進入下一工作循環。該設計實現了袋庫盤的連續供袋,提高了自動套袋裝置的運行效率。
3取袋機構
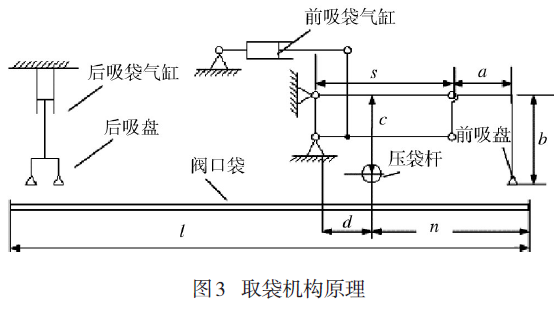
取袋機構主要功能是吸取套袋工位的閥口袋,並張開袋口等待機械手爪抓取。吸取和張開袋口動作同時進行,利用閥口袋單邊受力後袋口自動變形而張開袋口,前後同時吸取。由於前後吸取高度差,加上壓袋裝置的作用使得袋口自然變形張開。取袋機構工作原理見圖3,後吸盤與後吸袋氣缸直接連接,前吸盤與前吸袋氣缸之間由平行四杆機構轉換運動方式,平行四杆機構還具有行程放大的功能。工作時,前後吸盤同時吸取,前後吸袋氣缸縮回,帶動前後吸盤的提升,前吸盤在平行四杆機構的帶動下,位移量比後吸盤大,壓袋杆對閥口袋的阻力導致袋口自然變形後張開。見圖3,設計的平行四杆機構杆長度s=300mm,壓袋杆相對平行四杆機構位置c=70mm,d=50mm,前吸盤相對高度b=100mm,伸出長度a=20mm。通過調節氣缸與平行四杆機構的相對位置,可達到理想的袋口張開效果。
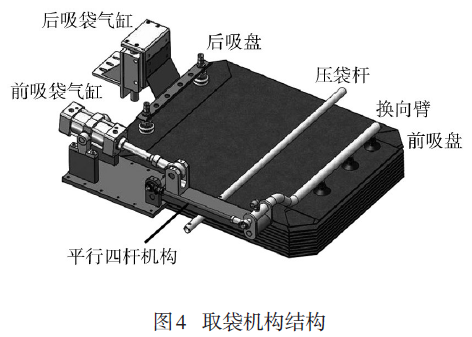
取袋機構三維結構見圖4,主要由前後吸盤、前後吸袋氣缸、壓袋杆、換向臂和平行四杆機構等組成。前吸盤采用換向臂結構布置,3個吸盤均勻布置,換向臂為空心管結構,吸盤氣路布置在換向臂內,這樣既降低了吸盤氣路受閥口袋粉塵的影響,又避免了氣管布置因反複運動造成的氣管老化和漏氣問題。同時,換向臂使得前吸袋氣缸可以布置在閥口袋的套袋工位以外,使得空間布局更加開闊,解決了與套袋機構機械手爪運動產生運動幹涉等問題。壓袋杆為圓杆,取袋時與閥口袋表麵貼合度好,不至於造成袋子的損壞。
4套袋機構
套袋機構主要實現將閥口袋平穩套至出料噴嘴上。由於出料噴嘴不是靜止狀態,而是隨著包裝機作圓周回轉運動,增加了套袋機構的設計難度。這裏,采用機械手爪和機械臂來設計套袋機構[10—13]。設計的套袋機構三維結構見圖5,由機械手爪抓取張口的閥口袋,在機械臂的驅動下,與回轉式包裝機的出料噴嘴對接,完成套袋動作。套袋機構運行的軌跡與出料噴嘴軌跡齧合時兩者對接穩定性較高。機械臂結構采用四杆機構構型,四杆機構末端運動軌跡變化取決於各杆杆長的比例[14—16]。對機械臂四杆機構建立數學模型,根據空間布局和套袋機構運動軌跡,優化設計出機械臂四杆機構的最佳尺寸。

機械手爪采用氣缸驅動,通過中間連接杆聯接2個手爪關節,使2個手爪關節運動能夠同步,見圖6。機械手爪在抓取袋子時,需避開取袋機構的換向臂,同時還要求能夠維持袋口張開狀態,因此,將手爪設計成對稱結構,還能保證閥口袋與出料噴嘴的安全對接,避免手爪與回轉式包裝機出料噴嘴產生幹涉。在手爪末端添加了緩衝墊設計,緩衝墊可以有效地降低在夾取袋子時由於速度過快和力量過大造成袋子破損的幾率。
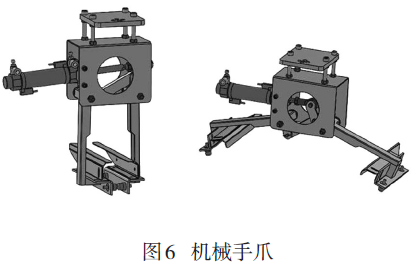
在SolidWorks中給模型添加材料屬性,測得機械手爪質量為5.2kg,四杆機械臂的質量為13.22kg,距回轉中心的距離為826.6mm,四杆機械臂的轉動慣量為5.85kg·m2。根據四杆機械臂的參數,選用取袋機構的伺服電機型號為YASKAWA的SGMGV-09A,額定輸出功率為0.85kW,額定轉矩為5.39N·m,瞬時最大轉矩為13.8N·m,額定轉速為1500r/min,轉子轉動慣量為13.9×10-4kg·m2。
5係統裝配
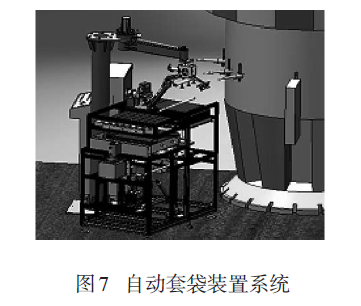
在完成供袋、取袋、套袋機構結構設計的基礎上,在SolidWorks中對各個機構進行虛擬裝配,係統裝配模型見圖7。經虛擬裝配後,牽引各機構運動,並未發現有運動幹涉現象,各個模塊的機構設計符合要求。
6結語
針對回轉式水泥包裝機需要人工套袋的難題,開發與其配套的自動套袋裝置,由供袋、取袋和套袋機構等3個模塊組成。供袋機構連續供應閥口袋,取袋機構吸取和張開閥口袋,套袋機構將閥口袋套入運動中的出料噴嘴,與包裝機對接完成水泥灌裝流程。采用SolidWorks軟件進行自動套袋裝置的機械結構設計,在參數優化的基礎上,設計了各個模塊的三維機械結構,並進行虛擬係統裝配,驗證了機構設計符合設備要求。
本文源於網絡轉載,如有侵權,請聯係刪除
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器