谘詢電話
ENGLISH0755-88840386包裝機凸輪連杆組合機構的動態特性分析
發布時間:2020-08-03 11:19:40 |來源:網絡轉載
引言
巧克力包裝機在高速情況下,需要通過凸輪連杆組合機構可以實現對巧克力的穩定推送和包裝。但在實際運行中,其構件會發生彈性變形,對其整個組合機構的運動和動態特性都會產生較大的影響,使執行構件的實際位移、速度和加速度與設計位移、速度和加速度產生明顯的振動偏差,因此在設計時,對組合機構進行動態特性分析是有必要的。故以巧克力包裝機的凸輪連杆滑塊組合機構為研究對象,將其看作一個質量係統,研究了運動過程中凸輪與推杆的動態響應,為凸輪連杆滑塊組合機構的動態特性分析提供了一種簡便直觀的方法。
2凸輪連杆組合機構動力學模型的建立
通常情況下對凸輪-從動件係統可以簡化為單自由度或者雙自由度模型進行分析,就可以達到實際工程的需要呪但針對巧克力包裝機的凸輪連杆滑塊組合機構在高速運轉的情況下,要保證在推送過程中運動狀態平穩。因此需要簡化成多自由度的動力學模型,使其計算結果更接近於實際工作情況。巧克力包裝機的一個凸輪連杆滑塊組合機構簡圖,它主要由凸輪軸、凸輪、隨動器、擺臂、連杆和推杆等多個構件組成,如圖1所示。
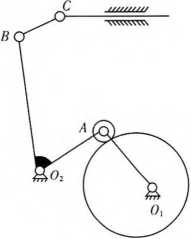
圖1機構的結構簡圖
2.1動力學模型簡化的研究
由於該組合機構凸輪軸支承的跨距較大,在高速轉動中,使凸輪產生在平行於從動件方向的偏移會直接影響到從動件的運動規律。因此對該組合機構的動力學模型簡化中考慮了軸的彈性變形對組合機構的影響。並根據構件彈性變形勢能守恒的原理對相應的杆件進行簡化%其簡化模型,如圖2所示。
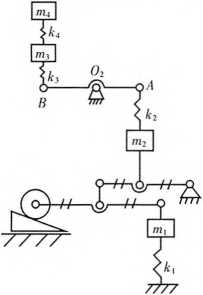
圖2等效質量、剛度的簡化模型
Fig.2SimplifiedModelofEquivalentMassandStiffness
簡化了凸輪的等效質量為風(假設質心在回轉中心),軸的等效剛度知。其餘構件按照集中質量進行等效,其中,皿、灼為擺臂04端在0點的等效質量和剛度;叫、知為擺臂0B端在B點的等效質量和剛度;m,、知為連杆和推杆從動件在C點的等效質量和剛度。
組合機構考慮了自身阻尼對係統的影響,根據文獻參考選擇具有阻尼係數C的粘性阻尼。即:
C=2^y/(k-m) (1)
式中:6—阻尼因子,根據經驗值可取g=(0.1~0.15);
一效剛度和質量。
2.2建立動力學模型
凸輪連杆滑塊組合機構為幾何鎖合型的凸輪-從動件係統,假設隨動器與凸輪是剛性的連接在一起,因此把4點的等效質量轉化到凸輪上,同時通過擺臂40B的杠杆比把4端的所有等效質量和等效剛度轉化到8端,最終簡化成一個三自由度的動力學模型,如圖3所示。
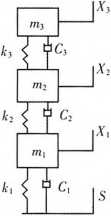
圖3機構動力學模型的建立
Fig.3EstablishmentofMechanismDynamicsModel其相應的等效質量和剛度可由下列關係求得:
2 2
M}=(771)+m2)iK]=ki呉^
L()B L.r
M2=m3
M3=m4,K3=k4
3動力學平衡方程和仿真模型的建立
3.1動力學平衡方程的建立
根據圖3所示的簡化模型,由牛頓第二運動定律,建立的動力學方程平衡方程如下地
M]%!+(C]+C2)x]-C2x2+(K]+K?)叫-K?%2=K|s (2)
M2x2-C2x,+(C2+C3肉-Gx3-K2xt+(K2+K3)%2%3=0(3)
M3x3-C3x2+C3x3-K3x2+K3x3=0 (4)
轉化成矩陣形式方程為:
MX+CX+KX=K}S(t)
00
M=0M20;
00M3
C】+C2—C2 0
c=-C2C2+C3_g;
0-c3c3
Kt+K2-K2 0
K=-K?K2+K3-K3;
0 -K3 K3
S(z)=(s,O,O);
X=(%(tx29x3);X=(xt9x29x3);X=(%jtx2,x3) (5)
式中:M、C、Kw於7效質量、阻尼和剛度矩陣;
%)wR女」當量激振位移矩陣。
3.2仿真模型的建立
根據上述動力學平衡方程建立了相應的Simulink仿真模
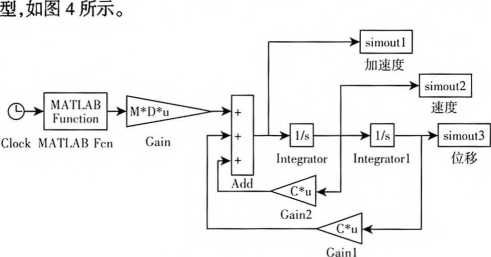
圖4Simulink仿真模型
Fig.4SimulationModelinSimulink'
4實例驗證
4.1推杆運動規律的選取
對如圖1的凸輪連杆組合機構進行設計時,為了在高速運轉過程中保證執行構件的定位精確和運動更加平穩。執行構件推杆釆用了修正擺線運動曲線規律,並逆向對凸輪輪廓曲線進行了設計。
其凸輪軸轉速為450Hmin,其執行構件推杆的運動規律:推程為84mm,推程運動角為120。;遠休g角為135。;回程為84mm,回程運動角為105。測可獲得當量激誠位移s=(z)的變化規律。
4.2仿真結果及分析
針對上述模型的簡化,對各構件進行了等效質量、等效剛度和阻尼參數的轉化,如表1所示。
表1等效質量、等效剛度和阻尼參數
Tab.1ParametersofEquivalentMass,
StiffnessandDamping
|
等效質量(kg) |
等效剛度(107N/m) |
阻尼(lO'N.s/m) |
|
昭=0.525 |
K,=0.768 |
G=0.402 |
|
財2=0.102 |
^2=0.75 |
C0175 |
|
4/3=1.01 |
K3=10.2 |
B.1 |
(b)M(推杆C點)的加速度響應
圖5構件的動態響應
Fig.5DynamicResponseofComponent
根據圖3的動力學模型,並通過對執行構件推杆的運動規律選取和計算仿真,分別獲得了質量塊風(擺臂0』)的當量設計加速度和輸岀加速度響應、必(推杆C點)的設計加速度和輸出加速度響應,如圖5所示。結果表明:高速運轉的情況下,考慮了構件的彈性變形後,軸變形對凸輪運動有一定的影響,但影響不是很大。同時推杆C點的運動輸出響應有一定的波動,尤其在加速度的最高點,波動範圍比較大,但整個結果能滿足實際情況的工作需要。
5結論
在考慮了構件的彈性變形後,建立了凸輪連杆滑塊組合機構的動力學模型,並利用Matlab/Simulink軟件對其進行了動態特性分析,得出的各構件的加速度輸出響應與實際工況相差不大,驗證了該結構設計和動力學模型簡化的合理性。為凸輪連杆組合機構的設計和驗證提供了一種簡單直觀的方法。
文章來源於網絡轉載,侵刪
- 上一篇:包裝機散包檢測係統
- 下一篇:變頻器在食品包裝機上的應用
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器