谘詢電話
ENGLISH0755-88840386基於自適應模糊PID控製的電子皮帶秤研究
發布時間:2020-09-14 10:03:30 |來源:網絡轉載
水泥是最主要的建築材料之一,廣泛應用於工業與民用建築、道路、水利和國防工程。水泥包裝過程中有2個關鍵問題,一是稱重精度,二是稱重速度。在水泥包裝過程中為了提高包裝精度,水泥包裝線采用電子皮帶秤進行稱量⑴。電子皮帶秤是通過測量電子皮帶秤上物料的重量及皮帶運行的速度來進行計量的,是實現生產過程自動化和智能化的重要技術手段。
1電子秤稱重原理及控製係統的組成
1.1皮帶秤稱重原理
皮帶秤的稱量過程是:當物料通過皮帶秤輸送機計量段時,物料對稱重托編產生壓力,稱重傳感器輸出一個0~20mV與物料重量成正比的電壓信號,然後放大成0~5V的電壓信號,經A/D轉換器轉換後送往CPU進行運算;測速傳感器檢測出與速度成正比的脈衝信號並送往PLC控製器進行運算,測控係統對檢測到的信號進行處理,顯示重量、速度等參數。皮帶秤的稱重裝置安裝在輸送機上,即秤台。由於稱台是直接檢測物料重量的部件,因此它是決定皮帶秤精度的關鍵部件。秤台由傳感器、承重機構和稱重托輻等組成。與傳感器頂部相接的稱重托輾有單托輾和雙托輻。兩種雙托輻秤架配有2組計量托輻,其計量精度優於單托輻秤架。本係統中采用雙托輻秤架結構,雙托輻測量示意圖如圖1所示。若測量得到皮帶單位長度的載荷量為g(kg/m),皮帶傳動速度為隊m/s),則在7時間間隔內的物料重量W為:
w=\ dt (1)
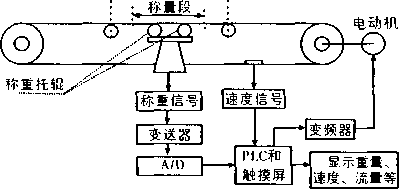
圖1雙托棍測量示意圖
1.2電子秤控製係統的組成
電子秤具有檢測速度快、精度高的特點,是典型的機電一體化係統,它由測控係統和稱重秤架兩大部分組成。係統組成框圖如圖2所示。測控係統硬件部分由稱重傳感器、測速編碼器、高精度A/D轉換器、變頻器、西門子PLC控製器S7-300和觸摸屏等組成,為了增強稱重采樣的穩定性,係統將雙傳感器安裝在皮帶兩側,以減小物體偏載。除了選用高精度的A/D轉換器模塊外,還配有自動校準法碼,以提高係統精度⑵。電子皮帶秤的傳動是由一台可變頻調速的交流異步電機帶動的。由於西門子PLC功能強大,其指令速度快,縮短了掃描周期,增強了控製的實時性,其性價比高。因此本係統選用西門子S7-300PLC作為控製主機,它帶有以太網接口、MPI接口、遠程I/O接口和串行口,可方便通過Profibus-DP現場總線進行各PLC之間的通信。觸摸屏與主機之間采用RS-232通信。PLC主要完成對輸送設備和稱量過程的實時控製,對係統故障檢測顯示、報警和其他設備的通信等。
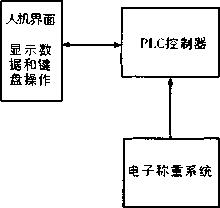
圖2係統組成框圖
2係統工作過程
電子皮帶秤是通過對K8凯发登录入口的控製來實現及時顯示K8凯发登录入口和準確稱量。本係統通過軟件將檢測到的重量傳感器信號和速度傳感器信號進行轉換、積算求出瞬時K8凯发登录入口,進而求出物料重量,因此皮帶稱的控製過程是對速度信號與稱量信號的釆集和控製。皮帶秤係統上電後將檢測送至PLC接口的瞬時K8凯发登录入口Qn與觸摸屏終端上設定K8凯发登录入口Qs的值,然後進行比較形成偏差。根據此偏差值e的大小,將自適應模糊PID運算產生的控製信號傳給變頻器,變頻器根據輸入值調節電機的轉速,使係統連續工作,係統控製框圖如圖3所示。PLC中CPU處理的是數字量,因此應先將傳感器檢測到的信號經A/D模塊轉換成數字信號後供給CPU,按照設定的算法進行計算處理;同理,經CPU運算後的數字量要經過D/A模塊轉換成模擬信號後供給變頻器,從而實現對電機轉速的閉環控製。同時,重量和K8凯发登录入口等數值也及時顯示在觸摸屏上。
3係統自適應模糊PID控製原理及設計
3.1模糊PID控製原理
電子皮帶秤是通過控製K8凯发登录入口來測定瞬時K8凯发登录入口和累計量,因此本係統為K8凯发登录入口閉環控製係統。通過對電機轉速的控製實現K8凯发登录入口控製,確保包裝物料的準確性和快速性。為了實現皮帶秤係統的實時、高精度和快速性,在係統的控製中采用了自適應模糊PID的控製算法。圖4為模糊PID控製器原理圖,它是將模糊控製與常規的PID控製相結合,應用模糊推理的策略,根據偏差e及偏差變化率ec的值,對PID參數53進行在線自調整,以達到最佳控製效果。在圖4所示係統控製器中,采用自適應模糊PID控製,選用K8凯发登录入口誤差e及其變化率ec作為模糊控製器的輸入語言變量,將kp,kt,kd作為模糊控製器輸出的語言量,它構成了一個3變量的2維模糊控製器,圖4中e和ec分別為K8凯发登录入口偏差及其變化率的精確值,E和EC則分別為模糊化後的值。作為模糊推理輸入量,在運行中不斷檢測由模糊控製規則推理和解模糊化後得到的PID參數a,這樣實現在線調整PID的3個參數,再由PID輸出值控製變頻器的輸出,實現對皮帶秤的快速、準確的控製,得到良好的動、靜態性能⑶。
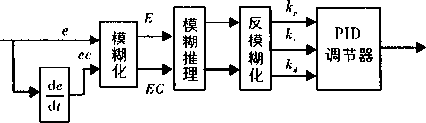
圖4模糊PID控製器原理圖
3.2模糊化
將輸入量E和EC量化在[-6,+6]之間,在其論域上取7個語言變量,負大、負中、負小、零、正小、正中、正大,分別用NL、NM、NS、ZE、PS、PM、PL表示。其隸屬函數表示某一確定量對E、EC模糊子集的隸屬程度,可應用隸屬函數實現精確量的模糊化,其隸屬度函數均為正對稱的均勻分布的高斯三角函數,如圖5所示。另外,模糊控製器的輸出53論域分別設在[-0.2,+0.2],[_2,+2],[-0.02,+0.02]之間,在其論域上取7個語言變量,負大、負中、負小、零、正小、正中、正大,分別用NL、NM、NS、ZE、PS、PM、PL表示,其隸屬度函數均為三角函數⑷。
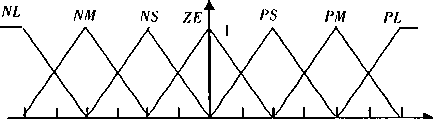
圖5E.EC和隸屬函數
3.3模糊推理和規則庫
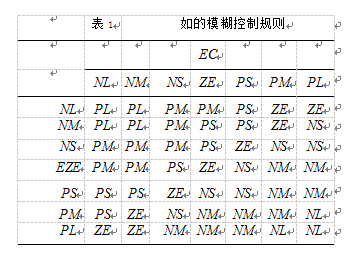
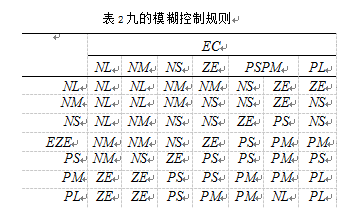
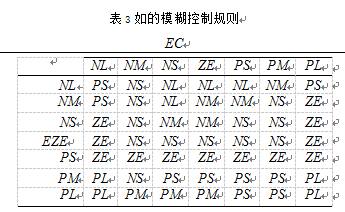
模糊推理是指將固定規則中的語言變量所對應的模糊關係集進行模糊運算,控製規則是指專家的經驗總結。由係統的動態和靜態性能分析可知:如的作用是加快係統的響應速度,使係統快速減小誤差;4的作用是消除靜差,改善係統的穩態;奶的作用是對偏差變化進行提前控製,在響應過程中抑製偏差向任何方向變化,改善係統的動態性能。根據3個參數之間的相互關聯,綜合考慮E和EC實際經驗,總結出其模糊控製規則如表1~3所示⑸。
根據規則庫的輸入輸出關係,釆用Mam-dani模糊邏輯推理,求出模糊輸出值,並釆用重心法解模糊。本係統采用離線計算方式,先將模糊控製規則離線計算後轉化為查詢表,則推理過程可簡化為查表運算,這樣實現了模糊控製器的實時控製和係統的快速性。
4軟件設計
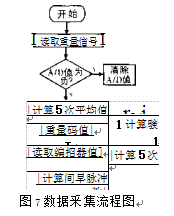
係統采用西門子S7-300PLC作為控製核心,以觸摸屏為人機界麵構成控製係統,PLC的程序設計包括2部分,即係統程序和用戶程序。本設計是對用戶程序進行設計,其功能包括:給定值設定、數據釆集及變換、觸模屏參數修改程序、調零及校秤程序、模糊PID運算程序、數據處理程序、報警及顯示等。圖6為主程序流程圖,其功能是進行係統自檢和初始化,若硬件正常,則係統周而複始地分時進入中斷程序,處理輸入、輸出信息。圖7為數據采集流程圖。
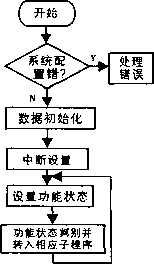
圖6主程序流程圖
5結束語
本文將模糊PID控製算法引入到電子皮帶秤係統中,並將PLC作為控製器。一方麵模糊PID控製算法不依賴於對象的精確模型,能克服係統的時變和非線性的影響,控製效果好;另一方麵係統充分利用PLC的可靠、靈活、抗幹擾能力強及較好的通信功能等優點,提高了係統的智能化程度。基於模糊PID控製算法和PLC控製器相結合的電子皮帶秤係統,控製程序實現了模塊化和標準化,具有編程靈活、方便實現模糊PID的控製規則和算法等優點,降低了係統開發成本,且有效地解決了過去皮帶稱係統的動態性能不理想、精度不高、可靠性差等問題,應用效果好,有一定的推廣價值。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器